Reparaturanleitung Neato Signature – Robotor scheint zu laden, obwohl er nicht mit dem Dock verbunden ist
Nach nicht einmal zwei Jahren hat sich mein Neato Signature leider verabschiedet. Die Anzeige im Display hat permanent symbolisiert, dass das Gerät laden würde. Egal ob er mit der Dockingstation verbunden war oder nicht. Dadurch ließ sich natürlich kein Reinigungsvorgang starten. Nach kurzem Kontakt mit dem Kundenservice von Neato wurde mir gesagt, dass ich außerhalb der einjährigen Garantie bin und ich Pech hätte. Der Händler hatte angeboten, einen Kulanzantrag bei Neato zu stellen. Ich hätte das Gerät aber vorher zum Händler schicken müssen – alles auf meine Kosten. Leider habe ich nicht bei Amazon bestellt :(
Da ich die Chance für relativ gering hielt, dass der Kulanzantrag funktionieren würde, habe ich mich selber ans Werk gemacht. Erfolgreich! Die Reparaturkosten lagen bei ca. 2 Euro.
HINWEIS: Durch das Öffnen des Geräts erlischt die Garantie. Weiterhin übernehmen wir keine Verantwortung für eventuelle weitere Schäden, die durch die Reparatur entstehen könnten. Die Reparatur erfolgt auf eigenes Risiko!
Das Fehlerbild
Um zu beurteilen ob diese Reparaturanleitung zu dem jeweiligen Problem passt, vergleicht bitte vorher die Symptome. Sollte es Abweichungen geben, ist es fragwürdig ob es Sinn macht, dieser Anleitung zu folgen. Sie kann natürlich als Hilfe bei der Demontage dienen.
Symptome:
Wenn das Gerät in der Dockingstation steht, läuft der Ladebalken im Display von links nach rechts
Wenn das Gerät NICHT in der Dockingstation steht, läuft der Ladebalken im Display von links nach rechts
Ein Neustart ändert nichts
Die Funktion „Neuer Akku“ ändert nichts
Problembeschreibung
Direkt hinter den Kontakten, die das Gerät mit der Dockingstation verbinden, befindet sich eine Schottky Diode. Durch diese Diode fließt der gesamte Ladestrom. Auf der Seite zum Dock hin, wird die Spannung abgegriffen und an den Mikrocontroller geführt, um zu erkennen ob das Ladegerät angeschlossen ist. Die Symptome deuten darauf hin, dass diese Diode in beide Richtungen Leitfähig geworden ist. Somit erreicht die Spannung des Akkus, den Mikrocontroller PIN, der das Ladegerät erkennen soll.
Ein Austausch dieser Diode behebt das Problem. Aufgrund der Schaltung kann die Diode geprüft werden, ohne sie herauslöten zu müssen. Ganz grundsätzlich wird aber nicht in der Schaltung gemessen ;) Die genaue Anweisung dazu folgt im nächsten Kapitel.
Benötigte Teile
Zur Reparatur wird im Wesentlichen nur eine Diode Benötigt, dennoch Liste ich kurz mein Material auf:
Ein vernünftiger Lötkolben oder Lötstation. Ich verwende die i-CON Pico von Ersa
Und natürlich eine neue Schottky Diode. Entweder eine ursprünglich verbaute vom Typ MBRS540T3G ODER
eine mit einer höheren Strombelastbarkeit. Ich habe diese hier im TO-220 Gehäuse verwendet. Kostet ca. 2€ und ist bei Amazon.de lieferbar.
Eventuell ein Multimeter mit Diodentest. Ist aber eher spielkram und nicht wirklich notwendig.
Reparaturanleitung
Leider muss der Roboter fast vollständig zerlegt werden, um an die Hauptplatine heran zu kommen. Glücklicherweise ist der Roboter sehr wartungsfreundlich. Es gibt nur wenig verschiedene Schrauben, alle Baugruppen sind Modular aufgebaut und lassen sich Problemlos als ganze Baugruppe demontieren, es ist nichts verklebt oder geklipst…
Dann mal los…
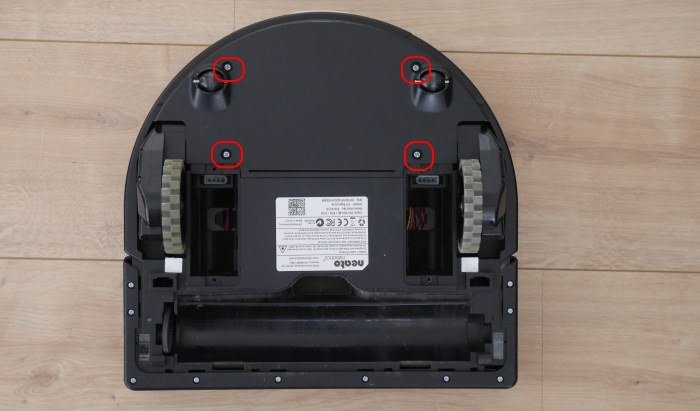
Zu Beginn wird der Staubbehälter entfernt und das Gerät ausgeschaltet. Nun werden die Akkus herausgenommen. Dazu die vier Schrauben an den beiden Fächern neben den Räder herausdrehen. Anschließend können die Akkus abgesteckt und entfernt werden. Im folgenden Bild ist dies bereits geschehen.
Nun werden die vier oberen Schrauben gelöst und der Deckel kann vorsichtig abgehoben werden. Eventuell sitzt er ein wenig fest in der Dichtung, da er den Luftstrom führt.
Anschließend kann noch die Bürste entfernt werden. Dazu einfach die beiden Hebelchen in Radnähe drücken (sorry, nicht markiert).
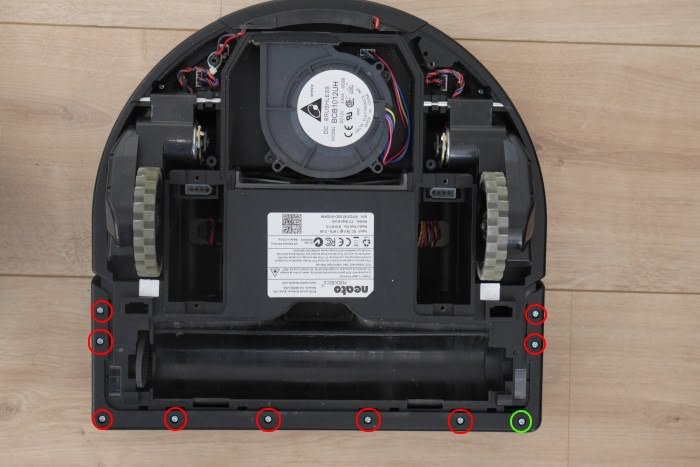
Als nächstes werden alle Schrauben am Bumper entfernt. Die grün markierte ist die einzige, die sich von den anderen unterscheidet (kürzer). Unbedingt bei dem Zusammenbau später beachten, da sie direkt in einen Sensor geschraubt wird.
Anschließend kann der untere Rahmen entfernt werden. Das sollte dann so aussehen:
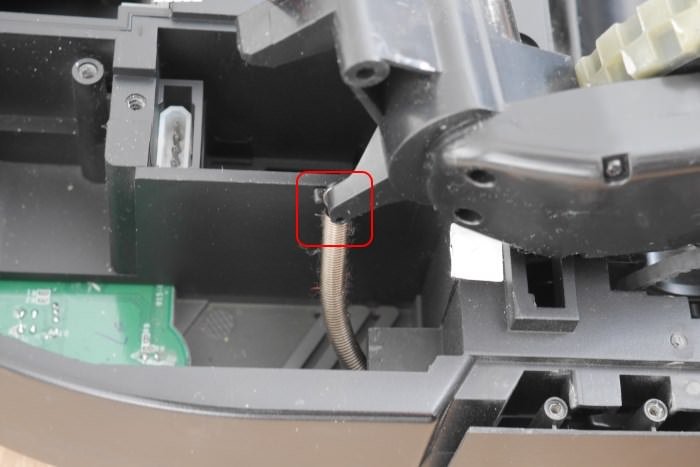
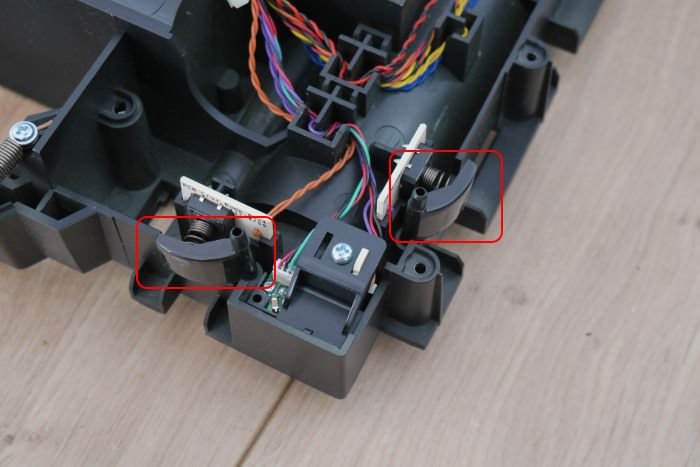
Kommen wir nun zu den Rädern. Dazu wird der im folgenden Bild rot markierte Nippel etwas in richtung Rad gezogen (vorsichtig!). Nun kann die Stange nach oben gehoben werden. Das klappt ganz gut, wenn man etwas am Rad drückt. Nun wird die Stange nach innen gezogen und der Stecker gelöst. Das gleiche erfolgt auch auf der anderen Seite.
Die Feder muss natürlich auch vorsichtig von der Radeinheit gelöst werden. Auf der anderen Seite ist sie übrigens festgeschraubt, sie kann also nicht verloren gehen.
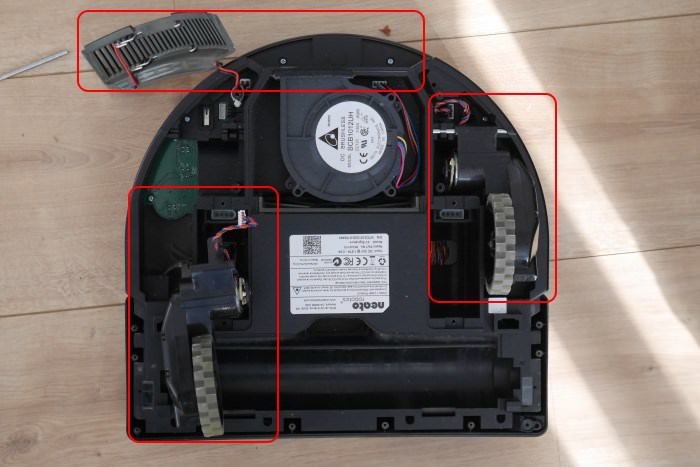
Nochmal das Gesamtbild. Beide Räder raus und die hintere Klappe kann auch entfernt werden, falls sie nicht bereits herausgefallen ist. Am besten ganz abstecken.
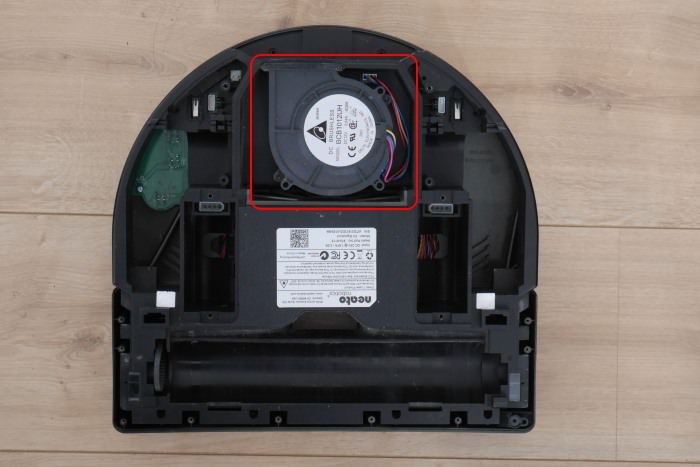
Nun wird der erstaunlich kleine „Saugmotor“ entfernt. Er kann einfach nach oben gezogen werden. Den Stecker vorsichtig lösen.
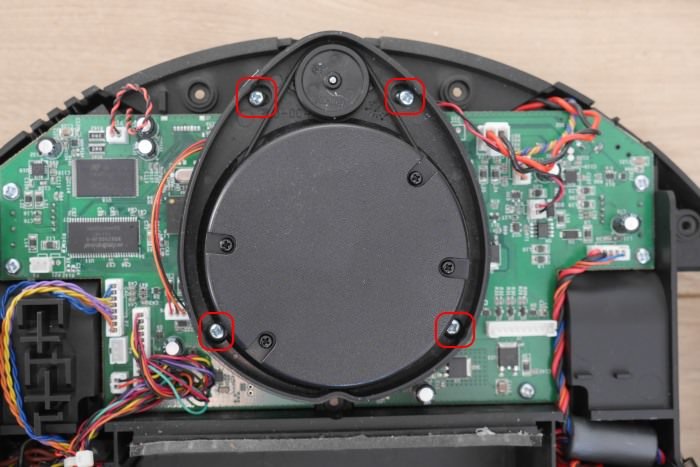
Unter dem Saugmotor und der hinteren Klappe waren übrigens weitere Schrauben. Diese und die anderen, im folgenden Bild markierten, Schrauben entfernen. Im vorderen Bereich müssen die beiden weißen Garantiesiegel durchstochen werden, um an die Schrauben zu kommen.
Nun am besten auf beiden Seiten mit beiden Händen die Gehäuseteile (oben/unten) zusammenhalten und vorsichtig den Roboter umdrehen.
Die Beiden markierten Schrauben müssen auch noch gelöst werden.
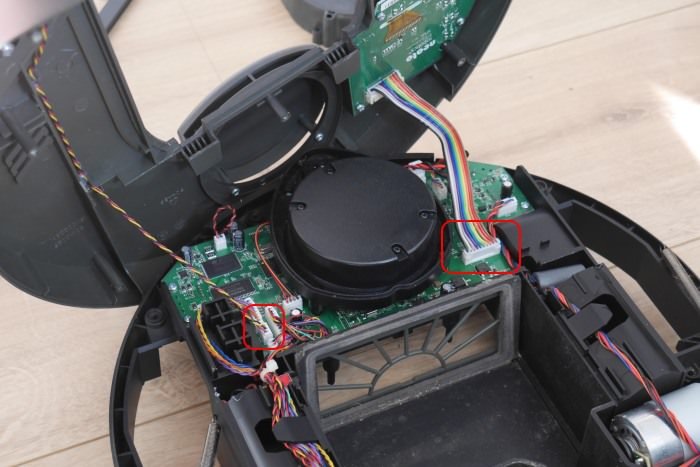
Nun kann der obere Teil des Gehäuses vorsichtig angehoben. Das linke Sensorkabel und das rechte Kabel für die Bedieneinheit muss abgesteckt werden.
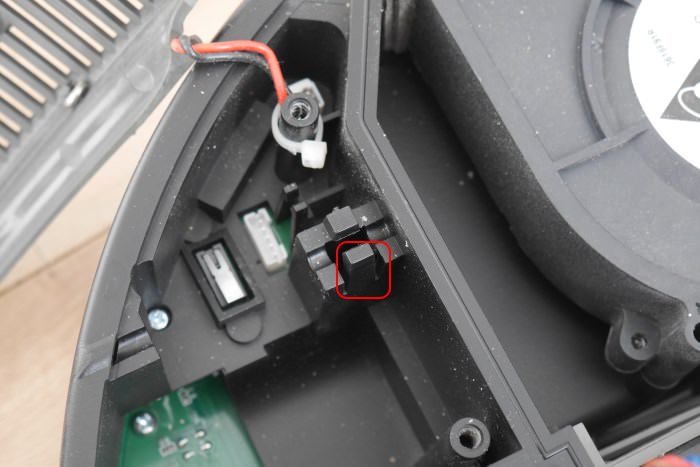
Nur ein kleiner Hinweis: Diese (insgesamt vier) Kontaktschalter – bzw. das Plastikteil davor – sollten nicht verloren gehen. Sie müssen beim späteren zusammenbau wieder genau so sitzen.
Kommen wir nun zu den letzten vier Schrauben. Damit wird der Laserscanner gelöst. Dabei sollte keine Kraft auf rotierende Teile wirken, da sonst der Scanner beschädigt werden könnte.
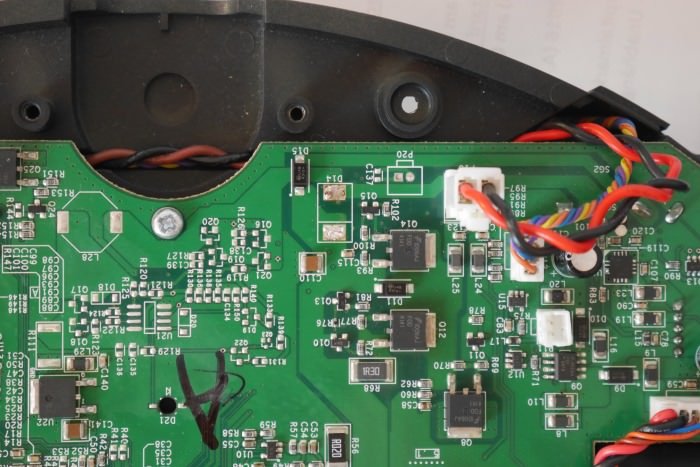
Nun ist die Hauptplatine hinreichend freigelegt. Alle anderen Kabel und Schrauben können bleiben.
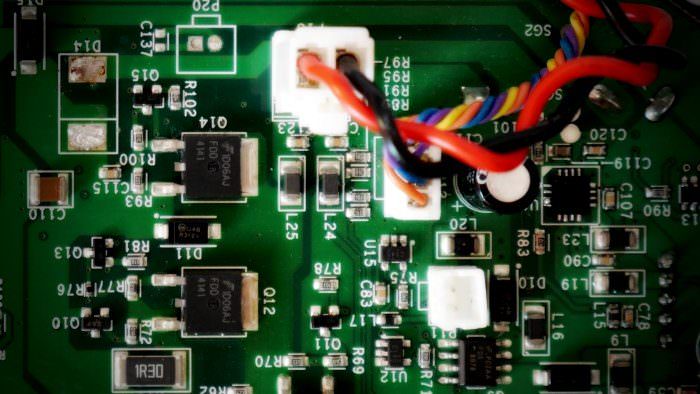
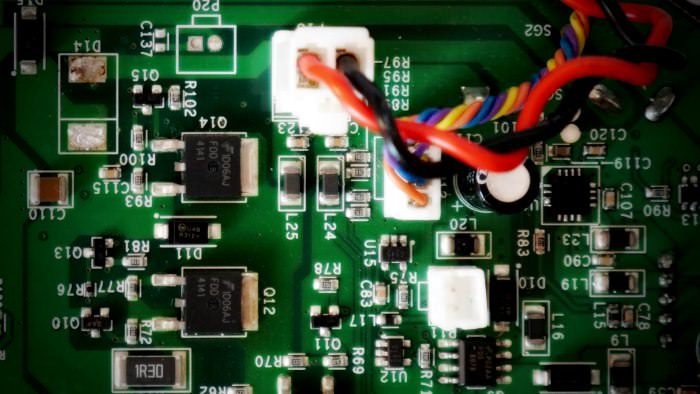
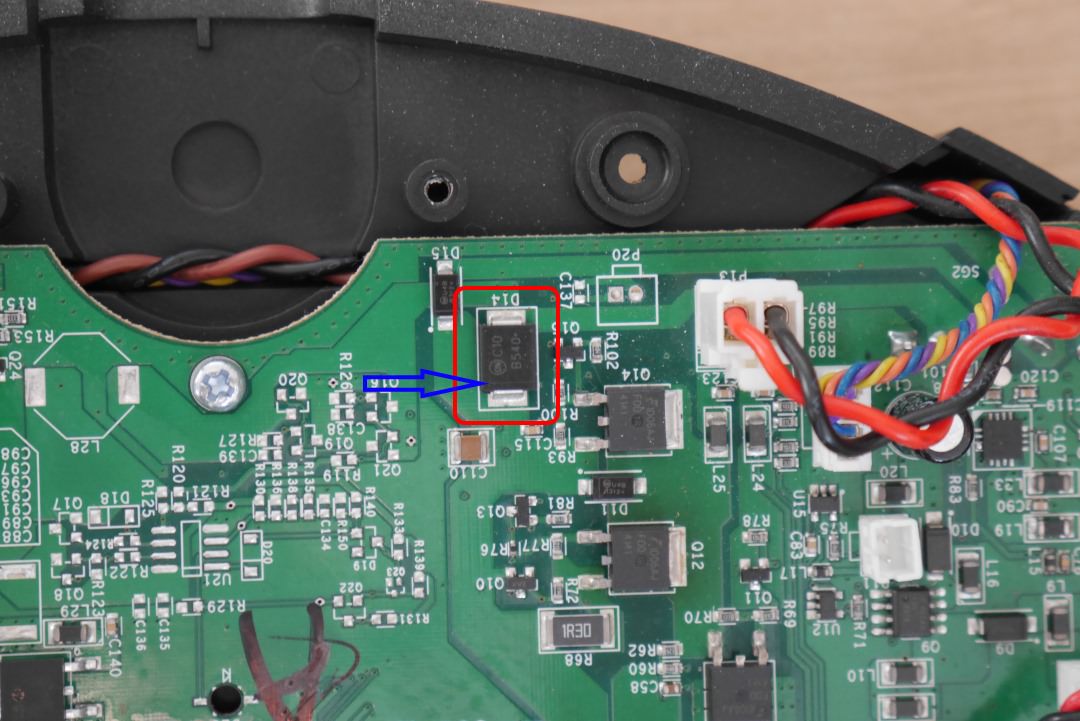
Bei mir war keine Beschädigung zu sehen. Der braune Bereich im unteren Teil der Platine ist durch das Fotografieren entstanden. Die Platine sah überall gut aus.
Im oberen Bereich finden wir die defekte Schottky Diode D14. An einer Seite befindet sich ein dünner Strich (blauer Pfeil) auf dem Gehäuse der Diode. Er kennzeichnet die Kathode.
Bevor gelötet wird, kann überprüft werden, ob die Diode tatsächlich defekt ist. Aufgrund der Beschaltung in diesem einen Fall, darf ausnahmsweise in der Schaltung gemessen werden. Dazu wird das Multimeter auf Diodentest umgestellt. Das Multimeter zeigt dann die Spannung an, bei der die Diode leitfähig wird. Die Diode sollte in einer Richtung natürlich nicht leitfähig werden. In meinem Fall wird sie aber in Sperrichtung bei ca. 0,5 V (linkes Bild) leitfähig. Sie ist also Defekt und will getauscht werden. Das rechte Bild zeigt die Korrekten Werte, sie scheint also nicht komplett gegrillt zu sein.
Es gibt viele Wege zum entlöten. Ich bevorzuge Entlötlitze und hasse diese Pumpen. Am besten ein wenig frisches Lötzinn auf den Kontakt bringen, damit ein besserer Wärmeübergang vom Lötkolben zum Pin besteht. Die Platine hat eine gute Kühlleistung. Anschließend kann die Diode vorsichtig angehoben werden (keine Kraft auf die Platine anwenden, sonst löst sich die Leiterbahn!).
Nachdem beide Seiten abgelötet sind, werden die beiden Pads mit der Entlötzlitze noch ein wenig gereinigt. Sieht dann so aus:
Die neue Diode darf auf keinen Fall verpolt werden. Sonst ist man dort, wo man vorher war, nur dass gar nicht mehr geladen werden kann.
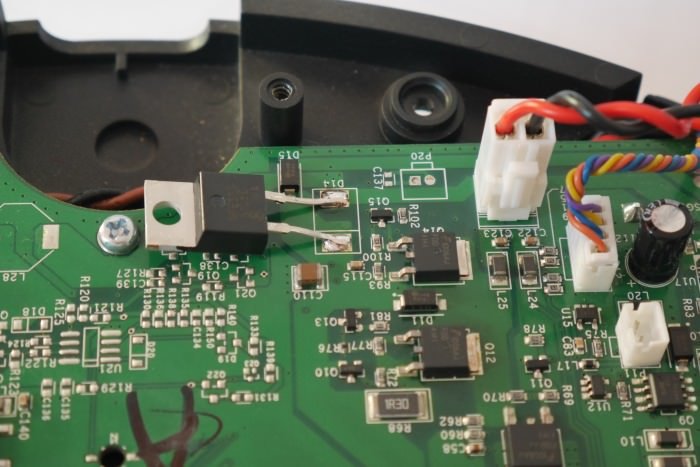
Ich habe mich für eine Schottky Diode im TO-220 Gehäuse entschieden, da sie wesentlich mehr Strom aushält als die alte. Ich hoffe das ganze hält jetzt länger als ein Jahr. Es kann aber natürlich auch der ursprüngliche Typ (MBRS540T3G ) verbaut werden. Eventuell könnte man dann einen kleinen Kühlkörper aufkleben.
Zu beachten ist auch die Höhe der gesamten Konstruktion. Über der Diode arbeitet der Laserscanner.
Aber Achtung, die Metallrückseite ist mit der Kathode verbunden. Sollte sie ein stück Metall auf der Platine berühren, kann dies die Platine stark beschädigen. Ich habe daher noch etwas Plastik auf die Platine unterhalb der Diode geklebt. Bis jetzt gab es keine thermischen Probleme. Aber wie gesagt: Ihr handelt auf eigene Verantwortung!
Nun kann der kleine wieder Zusammengesetzt werden. Schaut euch dazu noch die Tipps im nächsten Kapitel an.
Zusammenbau des Neato Signature
Am Ende muss der Roboter natürlich wieder zusammengesetzt werden. Dazu am besten langsam nach oben scrollen. Ein paar Tipps habe ich aber noch, um vorweg ein paar Problemen aus dem Weg zu gehen.
Laserscanner: Unbedingt darauf achten, dass die Einheit mit dem Scanner auf allen vier Punkten fest aufliegt und nicht kippeln kann. Dazu die Schrauben gut festziehen. Es sollte vermieden werden, Kraft auf die rotierende Einheit auszuüben.
Gehäuseoberteil: Beim Zusammensetzen nicht vergessen die beiden Kabel für das Bedienfeld und den Sensor anzuschließen. Im vorderen Bereich ist es bei mir nicht auf Anhieb eingerastet. Am besten Prüfen ob alle vier Druckschalter (bzw. diese Kläppchen davor) korrekt eingesetzt sind. Ansonsten ein wenig Rütteln und Wackeln.
Räder: Auch hier das Kabel und die Feder nicht vergessen. Beim Einsetzen der Radeinheit muss die Feder gespannt werden. Am besten großflächig am oberen Teil des Rades in Richtung Endposition drücken. Ist etwas fummelig, da sich die Räder drehen. Wenn sie zu weit herausstehen passt es nicht.
Bumper: Der vordere Bumper muss sich leichtgängig in alle Richtungen bewegen können und die Kontaktschalter müssen klicken! Verklemmt der Bumper, kann der Roboter später nicht mehr Navigieren. Nach einer gewissen Zeit kommt dann die Fehlermeldung „Vorderer Bumper Blockiert“ – Ja, die Meldung kam bei mir.
Zusätzliche Roboterpflege
Wenn man gerade dabei ist, kann man auch gleich mal nach den Verschleißteilen schauen. Bei einigen macht ein Austausch Sinn.
Bürste: Je nach Zustand der Bürste bietet sich ein Wechsel an. Ich habe übrigens schon in der ersten Woche zu der Vorwerk-Bürste des VR-100 gewechselt. Sie passt problemlos, ist erstaunlicherweise wesentlich leiser und aufgrund der echten Borsten erzielt sie gerade bei Teppichen bessere Ergebnisse. Kostet bei Amazon ca. 30 € und war damit günstiger als im Vorwerk Shop.
Akkus: Da ich zu Beginn gehofft hatte, dass neue Akkus das Problem lösen könnten, habe ich einfach mal welche bestellt (diese hier). Da sie jetzt gekauft sind, kommen sie natürlich auch rein. Für unter 40€ gibt es bereits ein Akku-Set. Somit schafft der Roboter wieder eine Etage ohne laden zu müssen :)
Pollenfilter: Der Filter lässt sich Problemlos tauschen. Ist er zugesetzt, steigt der Luftwiderstand und die Reinigungsleistung sinkt. Die hochwertigen Filter kosten ca. 3,30 € pro Stück, die günstigen Filter liegen ca. bei 2,25 €.
Die neuen Akkus sind exakt baugleich mit den Originalen. Folgendes Bild zeigt links die neuen Akkus und rechts die originalen Akkus.
Fazit
Der Roboter ließ sich erstaunlich gut zerlegen und wieder zusammenbauen. Daher würde ich sagen, es lohnt sich definitiv diese 2 € und ein wenig Zeit zu investieren. Wenn alles am Stück erledigt wird, sollte eine Stunde reichen.
Falls ihr euren Signature nach meiner Anleitung repariert habt, würde ich mich über einen Kommentar freuen. Gerne mit Angabe der übrig gebliebenen Schrauben. Bei mir waren es vier :-O
Schritt-für-Schritt Anleitung: Einrichtung und… 9. März 2026 Ich weiß noch genau, wie ich meine erste smarte Zahnbürste – eine Philips Sonicare DiamondClean📦 – aus der Verpackung genommen…
Fehlerbehebung bei smarten Zahnbürsten: Häufige… 18. Februar 2026 Bei „Fehlerbehebung bei smarten Zahnbürsten: Häufige Probleme und Lösungen“ geht es jetzt um konkrete Entscheidungen, typische Stolperfallen und saubere Umsetzung.…
Preis-Leistungs-Check: Kabelgebundene vs.… 10. März 2026 In diesem Beitrag zu „Preis-Leistungs-Check: Kabelgebundene vs. Akkubetriebene Haartrockner – Welcher lohnt sich wirklich?“ schauen wir auf klare Empfehlungen statt…
https://technikkram.net/wp-content/uploads/2016/08/NeatoSignature-PCB.jpg394700Philipphttps://technikkram.net/wp-content/uploads/2019/05/technikkram_transparent.pngPhilipp2016-08-26 23:27:222016-08-26 23:27:22Reparaturanleitung Neato Signature – Robotor scheint zu laden, obwohl er nicht mit dem Dock verbunden ist
20Kommentare
wilfried sagte:
hello I do not know if this article is still relevant but I have a fault on a coil (inductor) L24 and I would like to replace it do you have a reference or a value to advise me thank you in advance
bonjour je ne sais pas si article est encore d’actualité mais j’ai ne panne sur une bobine (inductor) L24 et je souhaiterai la remplacer avez-vous une référence ou une valeur à me conseiller merci par avance
Hallo liebe Mitstreiter, ich habe einen VR 100 und da hatte es den Motor vom Laserturm erwischt…gewechselt…Vorwiderstand gewechselt….aber er macht keine Raumerkennung, denn der IC …3128 / 22A2G (8PIN) ist auch defekt. Ich finde diesen aber absolut nirgends. Hat jemand da noch einen Gedanken ?
Es wär Spitze.
Vielen Dank
PETER
Hallo Philipp, dein Bericht ist ja eine Granate für die Leute , die was von Elektronik verstehen…..leider gehöre ich als Frau nicht dazu….. ich kann dir eine Menge über Zahntechnik erzählen ( da lötet man auch ab und an:))) ) aber Elektrotechnik sind böhmische Dörfer für mich…. Du hast nicht zufällig ein wenig Zeit und Lust meinen VR 200 auseinander zubauen ? Nach einem Update fährt er die Station auch nicht mehr an, es fehlen 30cm .Aus der Garantie ist er leider auch raus…die Saugleistung ist super..er lässt sich auch nicht mehr über das Menü ausstellen.. da sagt er mir ich soll ihn aus der Station nehmen ….geht aber trotzdem nicht. Die Software wurde auch wieder in die Werkseinstellung zurückgesetzt….klappt nicht….irgendwo hatte ich gelesen, wenn die Ladepole kontakt während der Reinigung mit Metall haben, könnte es einen Kurzschluss irgendwo auslösen….das wäre eine weitere Möglichkeit…leider fehlt mir die Ausrüstung und das nötige Wissen für eine Reparatur…
Das blöde Teil steht jetzt schon über 1 Jahr hier rum und langweilt sich…..dabei gab es mal eine so tolle Zeit zu zweit….:) Evtl. kannst du mir einen Betrieb ( außer Vorwerk) nennen, oder hast jemanden der gerne bastelt……ich würde mich freuen, wenn du mir da helfen könntest……
…liebe Grüße sendet Motte
Hallo, hab gerade gelesen das ihr Sauger def. ist . hab meinen grade rep.
bin Techniker.würd ihnen das Gerät sonst rep.(falls der Fehler so ist wie sie es schreiben.kostet aber Porto(Hin u ret.+50€
nur wenn sie das möchten nat.
lg Sepp
Hallo,
das ist eine sehr gut Anleitung. Leider habe ich genau das andere Problem. Mein VR100 läd nicht mehr. Ich habe schon versucht ihn direkt anzustecken … geht leider auch nicht. Es leuchtet nur noch die LED orange. Hat jemand einen Tipp, was ich noch versuchen kann?
VG Charly
Moin, inspiriert durch diese Anleitung habe ich mal auf Verdacht die Dioden durchgemessen und ein defektes Bauteil (naürlich ein anderes als hier im Beispiel-wär ja auch zu einfach..) gefunden.
Ausgelötet und nun steh ich da.. auf dem Bauteil steht U 4 B RC11 …(war auf dem Platz mit der Beschriftung D 4 beim Kobold VR100)
ähm, kann mir jemand sagen was mir das sagen soll (GOOGLE hat mir leider nicht geholfen)
Was löte ich da nun wieder ein??
In der Hoffnung auf eine weiterbringende Antwort
verbleibe ich mit freundlichen Grüßen und danke für die tolle Anleitung
Mopy
Dankeschön für die Anleitung – bei mir war es zwar ein VR200, aber die Anleitung hat mir geholfen.
Falls noch jemand mit VR200 „Phantomladen“ per google hier landet:
Das zerlegen des VR200 beginnt damit den weißen Deckel am Laserturm zu entfernen (mit viel Mut ;-) nach oben ausclipsen), hintere obere Abdeckung entfernen, Display ausbauen und den Bumper mit den Ultraschallsensoren links und rechts ausclipsen.
Der Rest ist eigentlich selbsterklärend, viele Schrauben raus und noch mehr Steckverbinder lösen.
An meinem VR200 war die D5 defekt – kompletter Durchgang beide Richtungen.
Nicht verwirren lassen es gibt wie beim VR100 auch eine D14 auf der Platine.
Was mir etwas schleierhaft ist, das Neato diesen bekannten Serienfehler (google Neato D14 bringt jede Menge Ergebnisse) nicht korrigiert – man könnte fast von geplanter Obsolezenz ausgehen – mein Gerät hat rund drei Jahre gehalten.
Danke für das Teilen der Infos bezüglich des VR200. Der VR100 müsste ja bauglich sein, aber schienbar haben die das Hardwaredesign beim VR200 nochmal angefasst.
Ja, das mit der geplanten obsolenz hatte ich auch überlegt. Bei mir hat er nicht mal drei Jahre gehalten und der Support war leider sehr schlecht.
Hallo Philipp, vielen Dank für die ausführliche Anleitung. Da du dich offensichtlich mit der Materie sehr gut auskennst, darf ich dich um kurze Beantwortung meiner Frage(n) bitten. Ich bin selbst „stolzer“ Besitzer von 4 Neatos. Habe bei einem XV nun das Problem, dass die Uhr permanent auf 00:00 gestellt wird, sobald Akku leer ist. Weisst du, ob hier eine Stützbatterie vorhanden ist und wenn ja, wo? Bei einem Signature pro habe ich das Problem, dass er zwar die Ränder perfekt abfährt, aber er viele Bereich im Raum mehrfach säubert. Also entweder funktioniert das mapping nicht, oder der Laser hat Schaden. Hast du da Erfahrung? Vielen, vielen Dank und liebe Grüße, Gerhard
Hi Gerhard,
sorry für die späte Antwort, aber das war nichts für mal nebenbei auf dem Smartphone ;) Der XV hat keine Stützbatterie für die Uhr, da die internen Akkus ja eigentlich immer angeschlossen sind. Hast du denn das Gefühl, dass die Batterien irgendwie schlapp machen? Ich könnte mir vorstellen, dass die Spannung zu weit absinkt und er dann die Uhrzeit verliert. Aber wenn der Akku so weit hinüber ist, müsstest du das am Saug/Fahrverhalten merken. Du könntest natürlich auch mal die Spannung von beiden Akkus messen. Eventuell ist nur einer hinüber und genau der versorgt die Uhr.
Zu deinem zweiten: Dass er Bereiche mehrfach säubert ist doch nicht ganz falsch, solange er seine Bahnen sauber abfährt… Wenn du Spaß dran hast, gibt es ein inoffizielles Tool, mit dem du dir die Karte anschauen kannst, die der Laserscanner ermittelt. Da siehst du dann live die Karte von deinem Wohnzimmer ;) Ist natürlich ein sehr schlechtes Bild, aber daran kann man schon nachvollziehen, ob das in etwa hinkommt. Den Download findest du auf: https://bitbucket.org/heXor/neatocontrol/ Eventuell kannst du damit auch bei dem Uhrenproblem mehr herausfinden, bevor die die Akkus ausbaust. Die Software hat ein paar witzige Diagnosefunktionen ;)
Ich hoffe ich konnte dir weiterhelfen. Melde dich mal, falls du ein Problem lösen konntest.
Vielen Dank für die ausführliche Antwort. Ich hab die Akkus schon mehrfach getauscht. Aber normalerweise halten die anderen einen minimalen akkustand, wenn sie sich Mal verlaufen. Nur der eine eben nicht. Aber es hilft mir zu wissen, dass es keine stuetzbatterie gibt, da Brauch ich dann nicht weitersuchen. Das Tool probier ich gerne aus ;) … Hab auch vom neato Support einige Tipps bekommen. Hab den laser 5x nach links und rechts mit einem wattestaebchen gedreht ( Vorsicht nicht direkt in den laser). Alles bei abgeschaltenem Akku. Dann das Gerät Mal einige Minuten ausgeschaltet lassen, dann fuehrt er reset durch. Eine 2. Variante war, die start/Stopp taste für 20 Sekunden gedrückt halten. Jetzt navigiert er nach all den versuchen wieder richtig. Kann dir gerne Mail vom neato Support weiterleiten, wenn du mir Mailadresse gibst. Danke nochmal und liebe Grüsse, gerhard
Hey, das wäre super. Schick die mail bitte an philipp@technikkram.net . Vielleicht kriege ich meinen ja doch wieder gerettet. Der Bleibt gerne einfach im Raum stehen und meint, da wäre ein Hindernis. Ich habe das auf die Software geschoben.. Aber vielleicht lässt sich ja doch was machen.
Hallo Philipp,
ich habe einen Vorwerk VR200, der wie du sicher weisst auch von Neato gebaut wird
Mein VR200 zeigte die selben Akku ständig laden….
Zudem fand er nach der Reinigung nicht mehr an die Ladestation zürück
Da er noch in der Garantie war ging er zur Rep. zu Vorwerk
Wenn er mal aber nach der Garantiezeit nochmals das selbe Fehlerbild zeigt würde ich mich auf die Suche nach der Diode im VR200 machen und zum Lötkolben greifen :-)
War das bei deinem NEATO auch so dass er auch nicht mehr an die Station zurück fand ?
Für den Fall der Fälle habe ich mir mal deine Anleitung gemerkt
Und hier an dieser Stelle ein großes fettes DANKE für deine Mühe zu der Top Anleitung für die du sicher einiges an Zeit verbraten hast um auch anderen zu helfen
RESPECT
Hey Tomislav,
vielen Dank für dein nettes Feedback! Dann wünsche ich dir mal viel Erfolg mit der Garantie.
Ja, meiner hatte auch irgendwann Navigationsprobleme, allerdings ist er dann immer mitten im Raum stehen geblieben und sagte „Navigieren nicht möglich“. Und zwar bevor ich ihn aufgeschraubt habe. Aber das ist natürlich nicht besser geworden mit der neuen Diode.
Ja, mir ist die Zusammenarbeit zwischen Neato und Vorwerk bekannt. Der VR100 müsste baugleich zu dem Signature sein, aber es kann natürlich trotzdem kleine Abweichungen geben. Erst recht bei dem VR200… Also vorsicht ;) Aber bevor man ihn wegwirft, lohnt es sich auf alle Fälle ihn zu zerlegen. Der war erstaunlich Modular aufgebaut und somit super einfach zu zerlegen.
Hallo Philipp,
ich habe einen Neato Botvac 75. Seit kurzem lädt die Batterie nicht mehr. Die Anzeige symbolisiert zwar das er lädt, wenn er an der Station steht, aber die Anzeig: „Batterie leer, bitte laden“ erlischt nicht. Die Akku spannung liegt bei etwas über 12V. Denn Akku hatte ich vor ca. 1 Jahr alt. Ehe ich den Robi auseinanderschraube, wollte ich hören, ob das evtl. auch an der Diode liegen kann.
Danke für deinen Rat.
VG Busso














hello I do not know if this article is still relevant but I have a fault on a coil (inductor) L24 and I would like to replace it do you have a reference or a value to advise me thank you in advance
bonjour je ne sais pas si article est encore d’actualité mais j’ai ne panne sur une bobine (inductor) L24 et je souhaiterai la remplacer avez-vous une référence ou une valeur à me conseiller merci par avance
Hallo liebe Mitstreiter, ich habe einen VR 100 und da hatte es den Motor vom Laserturm erwischt…gewechselt…Vorwiderstand gewechselt….aber er macht keine Raumerkennung, denn der IC …3128 / 22A2G (8PIN) ist auch defekt. Ich finde diesen aber absolut nirgends. Hat jemand da noch einen Gedanken ?
Es wär Spitze.
Vielen Dank
PETER
Sehr schöne Seite und alles sehr ausführlich erklärt.
Vielen Dank dafür.
Hallo Philipp, dein Bericht ist ja eine Granate für die Leute , die was von Elektronik verstehen…..leider gehöre ich als Frau nicht dazu….. ich kann dir eine Menge über Zahntechnik erzählen ( da lötet man auch ab und an:))) ) aber Elektrotechnik sind böhmische Dörfer für mich…. Du hast nicht zufällig ein wenig Zeit und Lust meinen VR 200 auseinander zubauen ? Nach einem Update fährt er die Station auch nicht mehr an, es fehlen 30cm .Aus der Garantie ist er leider auch raus…die Saugleistung ist super..er lässt sich auch nicht mehr über das Menü ausstellen.. da sagt er mir ich soll ihn aus der Station nehmen ….geht aber trotzdem nicht. Die Software wurde auch wieder in die Werkseinstellung zurückgesetzt….klappt nicht….irgendwo hatte ich gelesen, wenn die Ladepole kontakt während der Reinigung mit Metall haben, könnte es einen Kurzschluss irgendwo auslösen….das wäre eine weitere Möglichkeit…leider fehlt mir die Ausrüstung und das nötige Wissen für eine Reparatur…
Das blöde Teil steht jetzt schon über 1 Jahr hier rum und langweilt sich…..dabei gab es mal eine so tolle Zeit zu zweit….:) Evtl. kannst du mir einen Betrieb ( außer Vorwerk) nennen, oder hast jemanden der gerne bastelt……ich würde mich freuen, wenn du mir da helfen könntest……
…liebe Grüße sendet Motte
Hallo, hab gerade gelesen das ihr Sauger def. ist . hab meinen grade rep.
bin Techniker.würd ihnen das Gerät sonst rep.(falls der Fehler so ist wie sie es schreiben.kostet aber Porto(Hin u ret.+50€
nur wenn sie das möchten nat.
lg Sepp
Hallo,
das ist eine sehr gut Anleitung. Leider habe ich genau das andere Problem. Mein VR100 läd nicht mehr. Ich habe schon versucht ihn direkt anzustecken … geht leider auch nicht. Es leuchtet nur noch die LED orange. Hat jemand einen Tipp, was ich noch versuchen kann?
VG Charly
Moin, inspiriert durch diese Anleitung habe ich mal auf Verdacht die Dioden durchgemessen und ein defektes Bauteil (naürlich ein anderes als hier im Beispiel-wär ja auch zu einfach..) gefunden.
Ausgelötet und nun steh ich da.. auf dem Bauteil steht U 4 B RC11 …(war auf dem Platz mit der Beschriftung D 4 beim Kobold VR100)
ähm, kann mir jemand sagen was mir das sagen soll (GOOGLE hat mir leider nicht geholfen)
Was löte ich da nun wieder ein??
In der Hoffnung auf eine weiterbringende Antwort
verbleibe ich mit freundlichen Grüßen und danke für die tolle Anleitung
Mopy
Dankeschön für die Anleitung – bei mir war es zwar ein VR200, aber die Anleitung hat mir geholfen.
Falls noch jemand mit VR200 „Phantomladen“ per google hier landet:
Das zerlegen des VR200 beginnt damit den weißen Deckel am Laserturm zu entfernen (mit viel Mut ;-) nach oben ausclipsen), hintere obere Abdeckung entfernen, Display ausbauen und den Bumper mit den Ultraschallsensoren links und rechts ausclipsen.
Der Rest ist eigentlich selbsterklärend, viele Schrauben raus und noch mehr Steckverbinder lösen.
An meinem VR200 war die D5 defekt – kompletter Durchgang beide Richtungen.
Nicht verwirren lassen es gibt wie beim VR100 auch eine D14 auf der Platine.
Was mir etwas schleierhaft ist, das Neato diesen bekannten Serienfehler (google Neato D14 bringt jede Menge Ergebnisse) nicht korrigiert – man könnte fast von geplanter Obsolezenz ausgehen – mein Gerät hat rund drei Jahre gehalten.
Grüße
Eric
Danke für das Teilen der Infos bezüglich des VR200. Der VR100 müsste ja bauglich sein, aber schienbar haben die das Hardwaredesign beim VR200 nochmal angefasst.
Ja, das mit der geplanten obsolenz hatte ich auch überlegt. Bei mir hat er nicht mal drei Jahre gehalten und der Support war leider sehr schlecht.
PS: Ich habe eine „SK 86C“ verwendet – gleiches Gehäuse, aber 8 A und 60 V Sperrspannung – funktioniert bisher.
https://www.reichelt.de/SB-SKE-4F-Dioden/SK-86C/3/index.html?ACTION=3&LA=446&ARTICLE=146601&GROUPID=2991&artnr=SK+86C&SEARCH=SK%2B86C
Hallo Philipp, vielen Dank für die ausführliche Anleitung. Da du dich offensichtlich mit der Materie sehr gut auskennst, darf ich dich um kurze Beantwortung meiner Frage(n) bitten. Ich bin selbst „stolzer“ Besitzer von 4 Neatos. Habe bei einem XV nun das Problem, dass die Uhr permanent auf 00:00 gestellt wird, sobald Akku leer ist. Weisst du, ob hier eine Stützbatterie vorhanden ist und wenn ja, wo? Bei einem Signature pro habe ich das Problem, dass er zwar die Ränder perfekt abfährt, aber er viele Bereich im Raum mehrfach säubert. Also entweder funktioniert das mapping nicht, oder der Laser hat Schaden. Hast du da Erfahrung? Vielen, vielen Dank und liebe Grüße, Gerhard
Hi Gerhard,
sorry für die späte Antwort, aber das war nichts für mal nebenbei auf dem Smartphone ;) Der XV hat keine Stützbatterie für die Uhr, da die internen Akkus ja eigentlich immer angeschlossen sind. Hast du denn das Gefühl, dass die Batterien irgendwie schlapp machen? Ich könnte mir vorstellen, dass die Spannung zu weit absinkt und er dann die Uhrzeit verliert. Aber wenn der Akku so weit hinüber ist, müsstest du das am Saug/Fahrverhalten merken. Du könntest natürlich auch mal die Spannung von beiden Akkus messen. Eventuell ist nur einer hinüber und genau der versorgt die Uhr.
Zu deinem zweiten: Dass er Bereiche mehrfach säubert ist doch nicht ganz falsch, solange er seine Bahnen sauber abfährt… Wenn du Spaß dran hast, gibt es ein inoffizielles Tool, mit dem du dir die Karte anschauen kannst, die der Laserscanner ermittelt. Da siehst du dann live die Karte von deinem Wohnzimmer ;) Ist natürlich ein sehr schlechtes Bild, aber daran kann man schon nachvollziehen, ob das in etwa hinkommt. Den Download findest du auf: https://bitbucket.org/heXor/neatocontrol/ Eventuell kannst du damit auch bei dem Uhrenproblem mehr herausfinden, bevor die die Akkus ausbaust. Die Software hat ein paar witzige Diagnosefunktionen ;)
Ich hoffe ich konnte dir weiterhelfen. Melde dich mal, falls du ein Problem lösen konntest.
Viele Grüße
Philipp
Hallo Philipp,
Vielen Dank für die ausführliche Antwort. Ich hab die Akkus schon mehrfach getauscht. Aber normalerweise halten die anderen einen minimalen akkustand, wenn sie sich Mal verlaufen. Nur der eine eben nicht. Aber es hilft mir zu wissen, dass es keine stuetzbatterie gibt, da Brauch ich dann nicht weitersuchen. Das Tool probier ich gerne aus ;) … Hab auch vom neato Support einige Tipps bekommen. Hab den laser 5x nach links und rechts mit einem wattestaebchen gedreht ( Vorsicht nicht direkt in den laser). Alles bei abgeschaltenem Akku. Dann das Gerät Mal einige Minuten ausgeschaltet lassen, dann fuehrt er reset durch. Eine 2. Variante war, die start/Stopp taste für 20 Sekunden gedrückt halten. Jetzt navigiert er nach all den versuchen wieder richtig. Kann dir gerne Mail vom neato Support weiterleiten, wenn du mir Mailadresse gibst. Danke nochmal und liebe Grüsse, gerhard
Hey, das wäre super. Schick die mail bitte an philipp@technikkram.net . Vielleicht kriege ich meinen ja doch wieder gerettet. Der Bleibt gerne einfach im Raum stehen und meint, da wäre ein Hindernis. Ich habe das auf die Software geschoben.. Aber vielleicht lässt sich ja doch was machen.
Danke schon mal :)
Sollt schon in deiner Inbox sein ;)
Hallo Philipp,
ich habe einen Vorwerk VR200, der wie du sicher weisst auch von Neato gebaut wird
Mein VR200 zeigte die selben Akku ständig laden….
Zudem fand er nach der Reinigung nicht mehr an die Ladestation zürück
Da er noch in der Garantie war ging er zur Rep. zu Vorwerk
Wenn er mal aber nach der Garantiezeit nochmals das selbe Fehlerbild zeigt würde ich mich auf die Suche nach der Diode im VR200 machen und zum Lötkolben greifen :-)
War das bei deinem NEATO auch so dass er auch nicht mehr an die Station zurück fand ?
Für den Fall der Fälle habe ich mir mal deine Anleitung gemerkt
Und hier an dieser Stelle ein großes fettes DANKE für deine Mühe zu der Top Anleitung für die du sicher einiges an Zeit verbraten hast um auch anderen zu helfen
RESPECT
Viele Grüße vom Bodensee
Tomislav
Hey Tomislav,
vielen Dank für dein nettes Feedback! Dann wünsche ich dir mal viel Erfolg mit der Garantie.
Ja, meiner hatte auch irgendwann Navigationsprobleme, allerdings ist er dann immer mitten im Raum stehen geblieben und sagte „Navigieren nicht möglich“. Und zwar bevor ich ihn aufgeschraubt habe. Aber das ist natürlich nicht besser geworden mit der neuen Diode.
Ja, mir ist die Zusammenarbeit zwischen Neato und Vorwerk bekannt. Der VR100 müsste baugleich zu dem Signature sein, aber es kann natürlich trotzdem kleine Abweichungen geben. Erst recht bei dem VR200… Also vorsicht ;) Aber bevor man ihn wegwirft, lohnt es sich auf alle Fälle ihn zu zerlegen. Der war erstaunlich Modular aufgebaut und somit super einfach zu zerlegen.
Viele Grüße zurück an den Bodensee
Philipp
Hallo Philipp,
ich habe einen Neato Botvac 75. Seit kurzem lädt die Batterie nicht mehr. Die Anzeige symbolisiert zwar das er lädt, wenn er an der Station steht, aber die Anzeig: „Batterie leer, bitte laden“ erlischt nicht. Die Akku spannung liegt bei etwas über 12V. Denn Akku hatte ich vor ca. 1 Jahr alt. Ehe ich den Robi auseinanderschraube, wollte ich hören, ob das evtl. auch an der Diode liegen kann.
Danke für deinen Rat.
VG Busso
Hallo Busso
Wie bist du weiter vorgegangen? Ich stehe vor dem selben Problem.