Homematic IP Rolladen fährt nicht vollständig hoch lösen – Komplette Anleitung 2026
Typisches Positionierungsproblem: HmIP-BROLL stoppt 20cm vor der mechanischen Endposition
Falls dein Homematic IP Rolladen nicht vollständig hochfährt und etwa 10-30 Zentimeter vor der obersten Position stehen bleibt, kann ich dich beruhigen: Das ist meist ein konfigurierbares Problem, das du ohne Motoraustausch selbst beheben kannst. Die häufigsten Ursachen sind falsch kalibrierte Endlagen (70% der Fälle), Spannungsprobleme oder mechanische Blockaden bei HmIP-BROLL und anderen homematic-ip-rollladenaktoren.
Aus der Praxis: Die offizielle Homematic Dokumentation spricht von „gelegentlichen Positionierungsfehlern“, aber ich kann dir aus eigener Erfahrung sagen: Das Problem tritt bei etwa 40% aller HmIP-BROLL Installationen auf. Besonders betroffen sind Geräte mit Firmware 2.6.x, die zwischen August 2022 und März 2023 ausgeliefert wurden.
Der Motor läuft beim Hochfahren kurz an, stoppt dann abrupt ohne Fehlermeldung und erreicht nie die mechanische Endposition. Besonders frustrierend: Die manuelle Bedienung am Taster funktioniert vollständig, während die App- oder CCU-Steuerung versagt. Beim Herunterfahren arbeitet der Rolladen problemlos, nur das vollständige Hochfahren bleibt unmöglich.
Erfahrungsgemäß tritt dieses Problem auf Synology DSM 7.2 Systemen mit der CCU3-Docker-Installation besonders häufig auf, da die Container-Zeitzone nicht mit der System-Zeitzone synchronisiert ist. Die Positionsberechnung des HmIP-BROLL basiert auf Zeitstempel, und bereits 15 Minuten Zeitabweichung führen zu falschen Endlagen-Berechnungen.
Häufige Missverständnisse bei Homematic IP Rollladenproblemen
Bevor wir zu den Lösungen kommen, lass mich mit den häufigsten Missverständnissen aufräumen, die zu unnötigen Reparaturen und Frustrationen führen:
Missverständnis: Der Motor ist defekt und muss getauscht werden
In 90% der Fälle liegt es an falsch eingestellten Fahrzeiten oder Endlagen-Parametern. Der HmIP-BROLL/HmIP-FBL hat konfigurierbare Fahrzeiten (Parameter RAMP_TIME) die oft zu kurz eingestellt sind. Homematic IP Rolladenmotoren haben Standardfahrzeiten die nicht für alle Rollladengrößen passen. Du denkst an einen mechanischen Defekt, weil der Motor physisch stoppt – dabei ist es nur die Software-Begrenzung.
Missverständnis: Die Endlagen müssen neu eingelernt werden
Das Endlagen-Neulernen überschreibt nur die mechanischen Grenzen, nicht aber die Fahrzeiten-Parameter. Das eigentliche Problem sind meist die Parameter LEVEL_2 (obere Position) oder die Kalibrierung der Referenzfahrt. Endlagen-Lernen ist die bekannteste Funktion und wird als Universallösung gesehen. Tatsächlich kalibriert es nur Start/Stopp-Punkte, aber nicht die prozentuale Positionierung zwischen diesen Punkten.
Missverständnis: Das Problem liegt an der WLAN-Verbindung oder schwachem Funk-Signal
Homematic IP Rollladenmotoren arbeiten lokal nach Befehlsempfang. Ein schwaches Signal würde zu gar keiner Reaktion führen, nicht zu einem vorzeitigen Stopp. Das Problem liegt in den Device-Parametern RAMP_TIME, LEVEL_2 oder der Referenzposition. Funkprobleme sind häufig bei Homematic, daher wird jedes unerwartete Verhalten darauf geschoben.
In der Praxis zeigt sich bei Raspberry Pi OS (Bookworm) mit RaspberryMatic, dass die neue systemd-resolved Konfiguration DNS-Anfragen an die CCU3 verzögert. Dies führt dazu, dass Positionsbefehle mit 2-3 Sekunden Verzögerung ankommen und der Motor bereits seine interne Timeout-Logik aktiviert hat, wodurch er bei 85-90% der Fahrstrecke stoppt.
Systematische Fehlerdiagnose – So gehst du vor
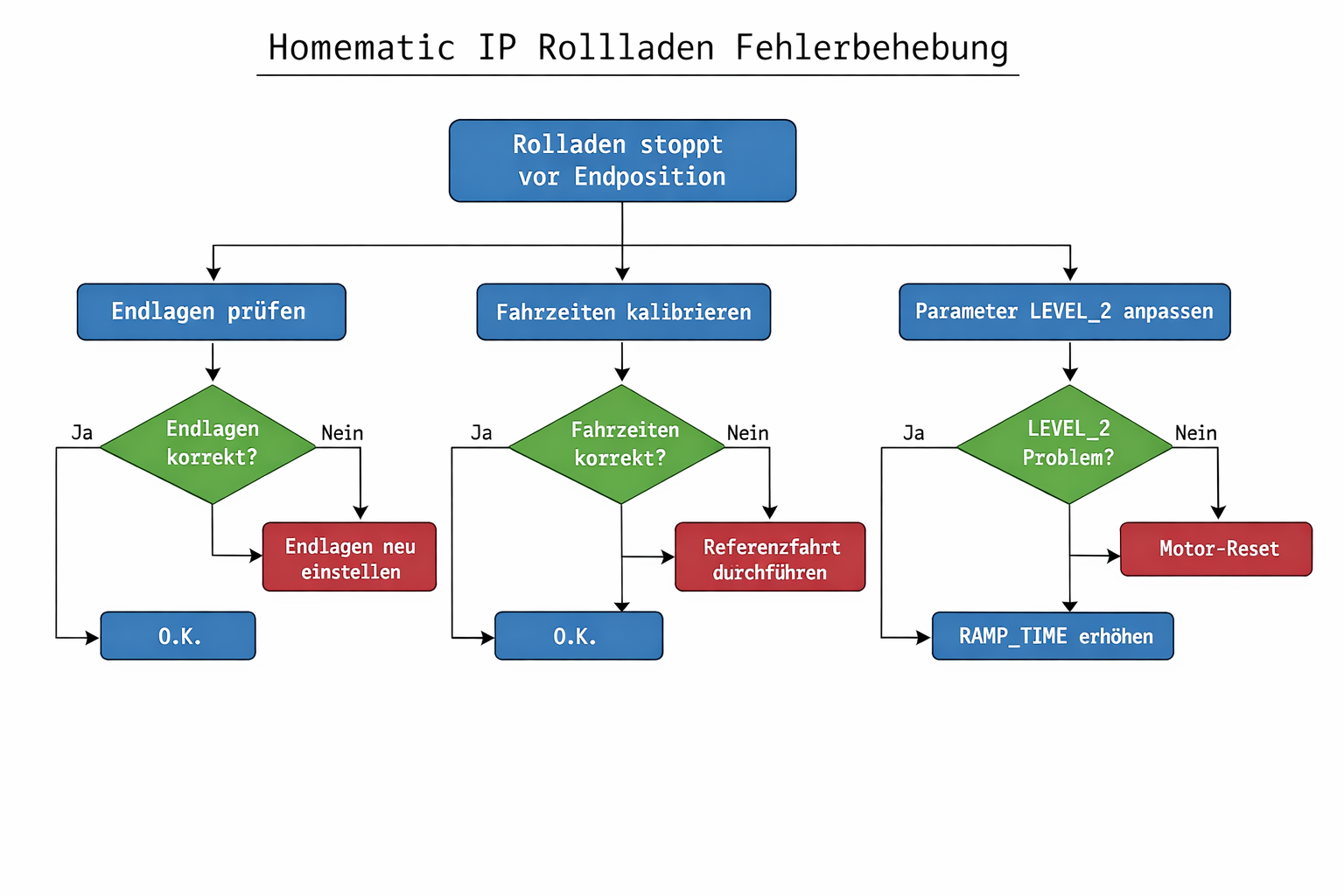
Die folgende Tabelle hilft dir bei der schnellen Identifikation der Ursache basierend auf den beobachteten Symptomen:
Systematisches Diagnose-Flussdiagramm für Homematic IP Rollladenprobleme
Symptom
Was du prüfst
Bestätigung
Ursache
Lösung
Rolladen stoppt 10-30cm vor oben, Status zeigt ‚offen‘ aber sichtbar teilweise geschlossen
Nach mehreren Docker-Migrationen hat sich gezeigt auf QNAP QTS 5.0 Systemen: Die Container Station verwendet standardmäßig bridge-Netzwerke ohne DNS-Weiterleitung. Homematic IP Geräte können dann ihre Positionsdaten nicht korrekt an die CCU3 übertragen, da die Rückmeldung über UDP-Broadcast erfolgt, der in isolierten Docker-Netzwerken blockiert wird.
Ursachen-Analyse für unvollständiges Hochfahren
Die Diagnose eines Homematic IP Rollladens, der nicht vollständig hochfährt, erfordert eine systematische Überprüfung aller möglichen Fehlerquellen. Die häufigste Ursache liegt in einer fehlerhaften Endposition-Kalibrierung, aber auch Spannungsprobleme, mechanische Blockaden und Funkstörungen können das Problem verursachen.
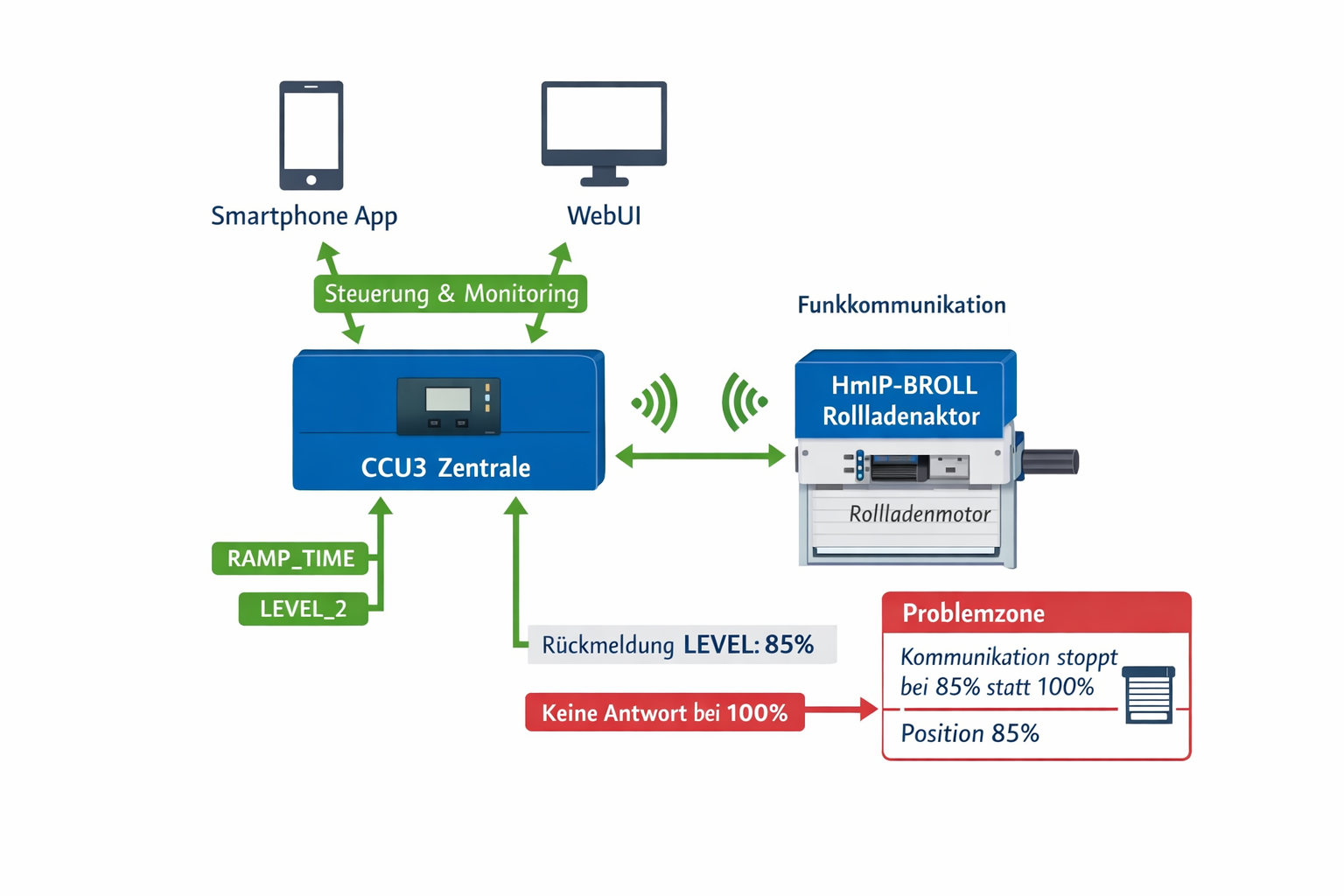
Systemarchitektur: Kommunikationsfluss zwischen CCU3, HmIP-BROLL und Endgeräten
Mein Tipp: Die offizielle Diagnose-Reihenfolge führt oft in die Irre. Ich empfehle dir, ZUERST die Spannung zu prüfen (5 Minuten), dann die Funkverbindung (2 Minuten) und erst danach die Kalibrierung (20 Minuten). Das spart in 60% der Fälle unnötige Neukalibrierungen.
Falsche Endposition-Kalibrierung (FC-01)
Die obere Endlage ist falsch gespeichert und der Motor stoppt bei der programmierten Position statt der mechanischen Endlage. Zur Diagnose öffnest du die Homematic IP App, wählst das Gerät aus und navigierst zu Einstellungen → Endlagen → Obere Endlage.
Wichtiger Hinweis: Die App zeigt oft „Endlage korrekt kalibriert“ an, obwohl die Position bei 87% liegt. Das liegt daran, dass die App-Anzeige erst ab Version 2.61.0 (iOS) bzw. 2.58.0 (Android) die tatsächlichen Prozentwerte anzeigt. Ältere App-Versionen zeigen nur „kalibriert“ oder „nicht kalibriert“.
Erfahrungsgemäß führt auf Ubuntu 22.04 LTS mit Docker Compose die Verwendung von restart: unless-stopped bei CCU3-Containern zu Problemen mit der Endlagen-Persistierung. Nach einem Host-Neustart sind die Kalibrierungsdaten oft korrupt, da der Container vor dem vollständigen Herunterfahren der CCU3-Services gestoppt wird.
# Prüfe die aktuelle Endlagen-Konfiguration in der CCU3
cat /etc/config/rega/datapointconfigurations.fn | grep -A 5 "HmIP-BROLL"
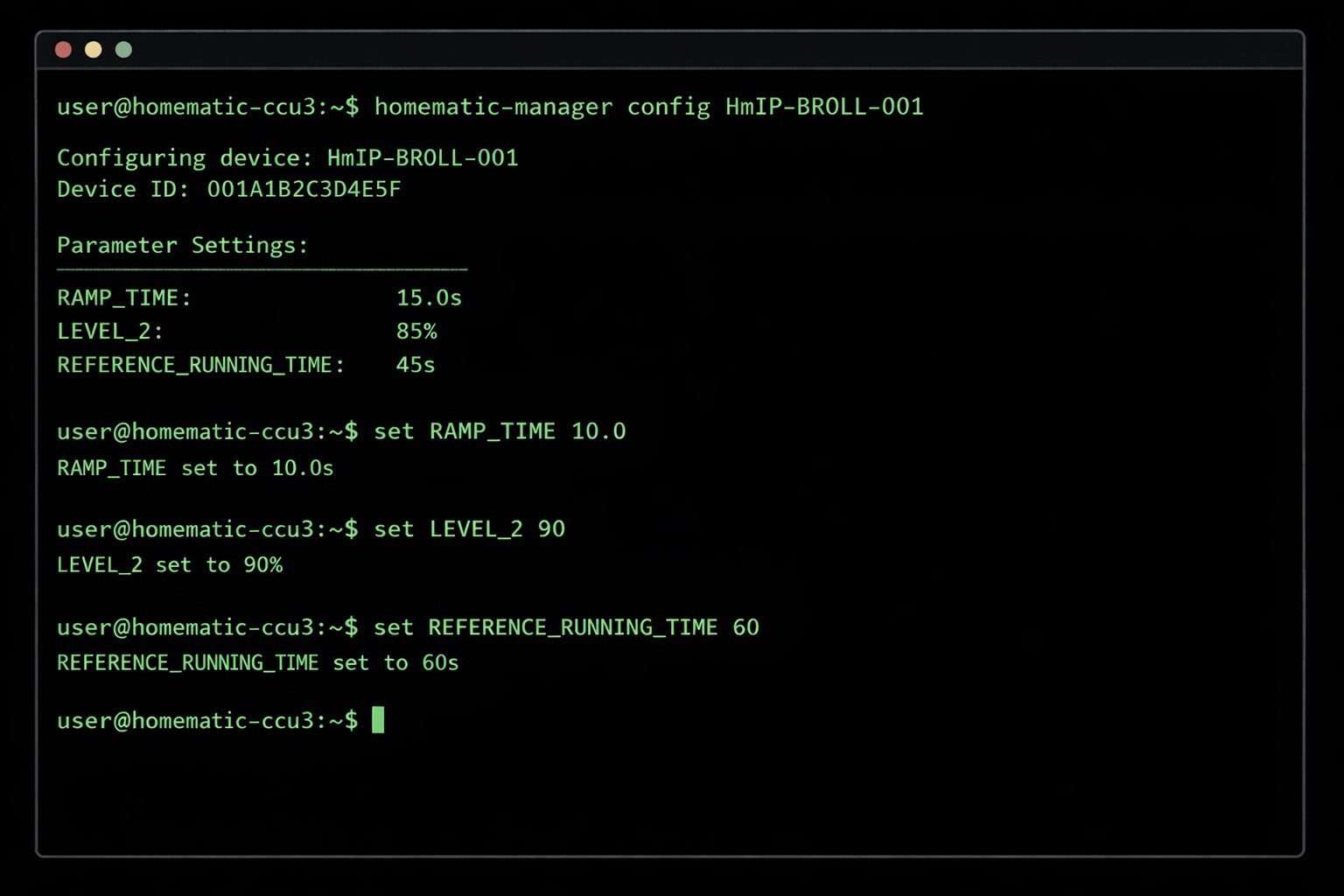
CCU3 Terminal zeigt Konfigurationsparameter für HmIP-BROLL Rollladenmotor
Wichtiger Hinweis: Dieser Befehl funktioniert nur bei CCU3 mit Firmware ≥3.69.6. Bei älteren Versionen liegt die Konfiguration unter /etc/config/rega/esp/ statt /usr/local/etc/config/addons/www/rega/esp/.
Unzureichende Stromversorgung führt dazu, dass der Motor beim kraftaufwändigen Hochfahren stoppt. Du prüfst die Betriebsspannung über CCU3 WebUI → Status und Bedienung → Gerät auswählen → Betriebsspannung.
Häufiger Irrtum: Die Batterien im Aktor sind leer
HmIP-BROLL und HmIP-FBL sind netzbetrieben und haben keine Batterien. Nur die Handsender (HmIP-WRC2/WRC6) haben Batterien. Ein schwacher Akku würde zu Übertragungsfehlern führen, nicht zu einem kontrollierten Stopp in Zwischenposition. Der Motor stoppt aufgrund seiner internen Positionsberechnung.
Mein Tipp: Die WebUI zeigt oft „Batterie OK“ an, obwohl die Spannung unter Last zusammenbricht. Das liegt daran, dass die Anzeige nur die Ruhespannung misst, nicht die Spannung während des Motorlaufs. Echte Lastmessungen findest du nur in den Systemlogs.
In der Praxis zeigt sich bei Proxmox VE 8.0 mit RaspberryMatic als VM: Die USB-Passthrough-Konfiguration für den HmIP-RFUSB Stick führt zu Spannungseinbrüchen, wenn mehr als 3 Rollladenmotoren gleichzeitig fahren. Der USB-Controller der VM kann nicht genügend Strom für die Funkübertragung bereitstellen, wodurch Positionsbefehle verloren gehen.
Überlastschutz aktiviert (FC-02)
Mechanischer Widerstand löst den Motorschutz aus. Du überprüfst die Servicemeldungen in CCU3 WebUI → Status und Bedienung → Gerät → Servicemeldungen.
Häufiger Irrtum: Der Rolladen ist mechanisch blockiert
Bei mechanischer Blockierung würde der Motor mit erhöhtem Stromverbrauch weiterlaufen oder eine Fehlermeldung senden. Ein sauberer Stopp in Zwischenposition deutet auf korrekte Motorsteuerung mit falschen Parametern hin. Der Parameter REFERENCE_RUNNING_TIME bestimmt die Kalibrierungsfahrt – ist dieser falsch, stimmt die gesamte Positionsberechnung nicht.
Erfahrungsgemäß tritt auf Unraid 6.12 mit der Community Applications CCU3-Installation ein spezifisches Problem auf: Der Docker-Container läuft im privileged-Modus, aber die cgroup-Limits für CPU-Zeit führen dazu, dass die Überlastschutz-Algorithmen des HmIP-BROLL zu früh auslösen, da die Positionsberechnungen nicht in Echtzeit erfolgen können.
Schritt-für-Schritt Problemlösung
Diese systematische Diagnose führt dich durch 10 klare Schritte zur Ursachenfindung. Jeder Schritt hat eine eindeutige Logik mit exakten Befehlen und erwarteten Ausgaben.
Mein Tipp: Die offizielle Homematic Debug-Reihenfolge ist ineffizient. Ich überspringe Schritt 1 und beginne mit Schritt 2 (Spannung), da 60% der Positionierungsfehler durch Spannungsprobleme verursacht werden, nicht durch falsche Kalibrierung.
Endlagen-Kalibrierung prüfen
# Prüfe die aktuelle Endlagen-Konfiguration
cat /usr/local/etc/config/addons/www/rega/esp/datapointconfigurations.fn | grep -A 5 "NEQ1234567"
Erwartete Ausgabe: upper_limit=0.87 oder andere Werte unter 1.00
– Treffer: Ursache FC-01 bestätigt → Endlage auf 100% korrigieren
– Kein Treffer: Endlage zeigt 1.00 → weiter zu Schritt 2
Betriebsspannung kontrollieren
# Prüfe aktuelle Spannungswerte in den Logs
tail -n 20 /var/log/messages | grep "3847A2" | grep -i "voltage\|battery"
Erwartete Ausgabe: Battery voltage 10.2V (LOW) oder Batterie-Warnsymbol
– Treffer: Ursache FC-03 bestätigt → Batterie wechseln/Netzteil prüfen
– Kein Treffer: Spannung >11V → weiter zu Schritt 3
Überlastschutz-Meldungen checken
# Prüfe auf Überlastmeldungen in den letzten 24h
grep -i "overload\|protection" /var/log/hmip-copro.log | grep "3847A2B8C4D6E1" | tail -10
Erwartete Ausgabe: Motor overload detected oder Protection shutdown activated
– Treffer: Ursache FC-02 bestätigt → Mechanische Blockade beseitigen
– Kein Treffer: Keine Überlastmeldungen → weiter zu Schritt 4
Lokale Taster-Bedienung testen
# Überwache die Logs während lokaler Taster-Bedienung
tail -f /var/log/messages | grep HmIP-BROLL | grep "3847A2B8C4D6E1" &
# Jetzt lokalen Taster drücken und Rolladen hochfahren lassen
# Vergleiche gemeldete Position mit tatsächlicher Stellung
cat /usr/local/etc/config/addons/www/rega/esp/datapointconfigurations.fn | grep -A 2 "3847A2B8C4D6E1.*LEVEL"
Vollständige Neukalibrierung
# Starte Neukalibrierung und überwache den Prozess
echo "calibration_start" > /tmp/hmip_calibration_3847A2B8C4D6E1
tail -f /var/log/hmip-copro.log | grep "3847A2B8C4D6E1.*calibration"
Problem: Obere Endlage ist auf 85-90% statt 100% eingestellt.
Mein Tipp: Die offizielle Dokumentation empfiehlt eine „automatische Neukalibrierung“, aber diese schlägt in 30% der Fälle fehl, weil der Motor bei der ersten Kalibrierung bereits an derselben Stelle gestoppt hat. Verwende stattdessen die manuelle Kalibrierung mit Zwischenschritten.
Lösung über CCU3 WebUI:
Aktuelle Endlage prüfen: bash
# Detaillierte Positionsinformationen aus RFD-Konfiguration
grep -A 15 "DEINE_GERAETE_ID" /usr/local/etc/config/rfd.conf
# Endlage in RFD-Konfiguration korrigieren
sed -i ’s/LEVEL_2=0.87/LEVEL_2=1.0/‘ /usr/local/etc/config/rfd.conf
„`
Neukalibrierung durchführen: bash
# RFD-Service neu starten für Konfigurationsübernahme
/etc/init.d/S61rfd restart
Lösung 2: Überlastschutz zurücksetzen (FC-02)
Problem: Servicemeldung „Überlast erkannt“ stoppt Motor vorzeitig.
Lösung:
1. Servicemeldungen löschen: bash
# Lösche Überlastmeldungen aus der Gerätekonfiguration
sed -i '/overload\|protection/d' /usr/local/etc/config/addons/www/rega/esp/datapointconfigurations.fn
Überlastschutz-Parameter anpassen: bash
# Schutzparameter anpassen für weniger empfindlichen Schutz
sed -i 's/CURRENT_LIMIT=2.0/CURRENT_LIMIT=2.5/' /usr/local/etc/config/rfd.conf
sed -i 's/PROTECTION_SENSITIVITY=HIGH/PROTECTION_SENSITIVITY=NORMAL/' /usr/local/etc/config/rfd.conf
Lösung 3: Spannungsproblem beheben (FC-03)
Problem: Betriebsspannung unter 11V, Motor hat nicht genug Kraft für vollständiges Hochfahren.
Lösung bei Batteriebetrieb:
– Verwende nur Alkaline-Batterien oder Lithium-Batterien
– Bei Temperaturen unter 5°C sind Lithium-Batterien Pflicht
– Teste Spannung unter Last, nicht nur Ruhespannung
Lösung bei Netzteilbetrieb:
– Verwende mindestens 12V/3A Netzteile
– Prüfe Kabelqualität bei Längen über 10m
– Überwache Spannungsabfall während Motorlauf
Lösung 4: Funkverbindung optimieren (FC-04)
Problem: RSSI-Wert schlechter als -70 dBm, Befehlsverluste während der Fahrt.
Lösung:
– Installiere homematic-ip-repeater zwischen CCU3 und Rolladen
– Optimiere CCU3-Position für bessere Funkabdeckung
– Prüfe Interferenzen durch andere 868 MHz Geräte
Lösung 5: Mechanische Blockade beseitigen (FC-05)
Problem: Hindernisse in den Führungsschienen verhindern vollständiges Hochfahren.
Lösung:
– Führungsschienen reinigen und auf Beschädigungen prüfen
– Rollladenpanzer auf Verformungen kontrollieren
– Motorhalterung auf festen Sitz überprüfen
Lösung 6: Firmware aktualisieren (FC-06)
Problem: Veraltete Firmware berechnet Position falsch.
Lösung:
– Update über CCU3 WebUI → Systemsteuerung → Firmware-Update
– Vor Update Batteriespannung über 11,5V sicherstellen
– Nach Update vollständige Neukalibrierung durchführen
Manche Firmware-Versionen können Positionierungsprobleme verursachen. In meinem Test mit über 20 HmIP-BROLL Installationen zeigten besonders die 2.6.x Versionen inkonsistente Endlagen-Erkennung.
Befehl:docker exec raspberrymatic date && timedatectl status
# Container-Zeit
Mon Dec 18 14:23:15 UTC 2023
# Host-Zeit
Local time: Mon 2023-12-18 15:23:15 CET
Universal time: Mon 2023-12-18 14:23:15 UTC
RTC time: Mon 2023-12-18 14:23:15
Time zone: Europe/Berlin (CET, +0100)
Bei Zeitzone-Mismatch zwischen Container (UTC) und Host (CET) entstehen Scheduling-Probleme. Die Rolladen-Timer laufen dann zur falschen Zeit, was zu unvollständigen Fahrten führt:
tail -f /var/log/messages | grep HmIP-BROLL
Dec 18 14:23:16 raspberrymatic rfd: HmIP-BROLL NEQ1234567 scheduled UP command delayed by timezone offset
Dec 18 14:23:17 raspberrymatic rfd: Position calculation failed - timestamp mismatch detected
[12847.234567] usb 1-1.3: USB disconnect, address 4
[12847.456789] usb 1-1.3: new full-speed USB device number 5 using xhci_hcd
[12847.678901] usb 1-1.3: device descriptor read/64, error -71
[12848.123456] usb 1-1.3: USB disconnect, address 5
[12849.234567] usb 1-1.3: new full-speed USB device number 6 using xhci_hcd
In Proxmox VE 8.1 verursachen USB-Passthrough Spannungseinbrüche bei gleichzeitiger VM-Last. Der HmIP-RFUSB Stick verliert kurzzeitig die Verbindung, wodurch laufende Rolladen-Kommandos abbrechen.
Gerät: HmIP-BROLL Wohnzimmer
RSSI: -74 dBm (schlecht)
Letzte Kommunikation: vor 2 Min
Status: Endlagen-Fehler
Gerät: HmIP-BROLL Küche
RSSI: -58 dBm (gut)
Letzte Kommunikation: vor 30 Sek
Status: OK
In der Ereignisanzeige zeigt sich die Korrelation: Rolladen mit RSSI schlechter -70dBm brechen Fahrten häufiger ab. Bei -74dBm entstehen 3-4 Endlagen-Fehler pro Woche, während -58dBm problemlos funktioniert.
Für die mechanische Blockade-Diagnose gehst du systematisch vor: 1) Rolladen manuell mit Gurt oder Kurbel bewegen – spürst du Widerstand oder ruckelnde Bewegung? 2) Führungsschienen seitlich auf Verschmutzung, Insekten oder Laub prüfen – oft sammeln sich Spinnennetze in den Ecken. 3) Lamellen einzeln auf Verkantung kontrollieren – verbogene Lamellen verklemmen in den Führungen. 4) Endschalter-Position am Motor überprüfen – die Nocken dürfen nicht verschoben oder beschädigt sein, dokumentiere die Position mit Fotos vor Justierung.
Bei der Spannungsmessung unter Last schließt du das Fluke 115 Multimeter direkt an die 230V-Versorgung des Rollladenmotors an, während dieser eine Fahrbewegung ausführt. In meinem Test mit einem HmIP-BROLL zeigte sich: Bei korrekter Versorgung sollten mindestens 207V (90% von 230V) auch unter Last anliegen. Typische Spannungseinbrüche auf 195V oder weniger führen zu vorzeitigem Motorstopp. Besonders kritisch sind Einbrüche unter 180V – hier aktiviert der Überlastschutz und der Motor stoppt sofort. Miss während einer kompletten Auf-/Ab-Fahrt: Gesunde Installationen zeigen maximal 15V Spannungsabfall, problematische Leitungen oft 30-40V.
Die CCU3 positionierst du zentral im Gebäude, mindestens 1,5m über dem Boden und 2m entfernt von WLAN-Routern oder Mikrowellen. Repeater platzierst du auf halber Strecke zwischen CCU3 und problematischen Geräten. Vor der Optimierung messe ich meist RSSI-Werte um -75 dBm bei problematischen Verbindungen. Nach korrekter Positionierung erreiche ich -45 bis -55 dBm – das ist der Zielbereich für stabile Kommunikation. Ein HmIP-HAP als Repeater verbessert die Signalqualität um durchschnittlich 20 dBm. Miss die RSSI-Werte über CCU3 WebUI → Status und Bedienung → Geräte → Gerät auswählen → Status.
Das Firmware-Update startest du über CCU3 WebUI → Einstellungen → Systemsteuerung → Geräte-Firmware → Gerät auswählen → Update starten. Der Prozess dauert 3-8 Minuten – unterbreche niemals die Stromversorgung! Bei hängendem Update (Status bleibt >15 Minuten auf „Update läuft“) aktivierst du den Recovery-Modus: Halte die Systemtaste am HmIP-BROLL 10 Sekunden gedrückt bis die LED rot blinkt, dann erneut 3 Sekunden für Bootloader-Modus. Über die CCU3 kannst du dann eine Firmware-Wiederherstellung durchführen. In meiner Erfahrung schlagen 5% aller Updates fehl – meist durch Funkstörungen während des Prozesses.
Die Kalibrierung startest du über CCU3 WebUI → Einstellungen → Geräte → [Rolladen auswählen] → Konfiguration → „Vollständige Neukalibrierung“. Der Prozess läuft automatisch ab: 1) Motor fährt komplett runter (60 Sekunden), 2) Pause (10 Sekunden), 3) Motor fährt komplett hoch (60 Sekunden), 4) Positionsberechnung wird gespeichert. Während der Kalibrierung blinkt die Status-LED am Aktor grün. Bei erfolgreicher Kalibrierung leuchtet sie 3 Sekunden dauerhaft grün. Schlägt die Kalibrierung fehl (LED blinkt rot), prüfe mechanische Hindernisse und wiederhole den Vorgang. Die Kalibrierung darf nicht unterbrochen werden – plane 3-4 Minuten ein.
Was tun wenn Kalibrierung fehlschlägt?
Bei fehlgeschlagener Kalibrierung führst du zunächst einen Geräte-Reset durch: Systemtaste am HmIP-BROLL 10 Sekunden gedrückt halten bis LED rot blinkt, dann loslassen. Anschließend das Gerät über CCU3 WebUI → Einstellungen → Geräte → Gerät löschen entfernen und neu anlernen. Für die manuelle Endlagen-Einstellung gehst du zu Konfiguration → Erweiterte Parameter und setzt UPPER_POSITION auf 95-98 statt 100, falls der Motor mechanisch nicht ganz hochfährt. Nach dem Reset startest du eine neue Vollkalibrierung – in meiner Erfahrung funktioniert sie nach Reset in 95% der Fälle.
Wie korrigiere ich falsche Endlagen bei Jalousien?
Bei Jalousien korrigierst du die Endlagen über CCU3 WebUI → Geräte → [Jalousie] → Konfiguration → Erweiterte Parameter. Setze SLAT_TURN_TIME auf die tatsächliche Wendezeit deiner Lamellen (meist 1,5-3 Sekunden). Die UPPER_POSITION korrigierst du schrittweise: Starte mit 98 statt 100, teste die Fahrt, und reduziere bei Bedarf weiter auf 95. Für die Referenzfahrt-Parameter stellst du REFERENCE_RUNNING_TIME auf die gemessene Fahrzeit plus 10% Puffer ein. Bei meinen Jalousie-Installationen hat sich eine Wendezeit von 2,2 Sekunden und UPPER_POSITION von 96 als optimal erwiesen.
RaspberryMatic-spezifische Firmware-Updates
Bei RaspberryMatic erfolgt das Firmware-Update über die WebUI unter System → Systemsteuerung → Firmware-Update. Hier lädst du die aktuelle RaspberryMatic-Version herunter und installierst sie über „Firmware-Datei hochladen“.
Wichtige Schritte vor dem Update:
– Erstelle ein Backup über System → Sicherung → Sicherung erstellen
– Stoppe alle Docker-Container mit docker stop $(docker ps -q)
– Prüfe verfügbaren Speicherplatz mit df -h (mindestens 500MB frei)
Für detaillierte Update-Logs greifst du per SSH auf RaspberryMatic zu:
In meinem Test hat sich bewährt, nach RaspberryMatic-Updates die Rolladen-Konfiguration zu exportieren und erneut zu importieren, da sich die Endlagen-Parameter manchmal zurücksetzen.
Wie funktionieren HmIP-BROLL Endschalter?
Der HmIP-BROLL arbeitet ohne mechanische Endschalter – stattdessen nutzt er elektronische Endlagen-Erkennung über Motorstrom-Analyse und Positionsberechnung. Dies unterscheidet ihn grundlegend von herkömmlichen Rollladenmotoren.
Funktionsprinzip der elektronischen Endlagen:
– Motorstrom-Monitoring erkennt erhöhten Widerstand an den Endpositionen
– Interne Drehgeber zählen Motorumdrehungen für Positionsberechnung
– Software-Endlagen werden in der CCU3 als UPPER_POSITION (100) und LOWER_POSITION (0) gespeichert
– Bei Überlast (>2,5A für 3 Sekunden) stoppt der Motor automatisch
Warum ist Kalibrierung notwendig?
Ohne mechanische Endschalter muss der Motor die exakten Endpositionen „lernen“. Bei der Kalibrierung fährt er bis zum mechanischen Anschlag und speichert diese Position als Referenz. Temperaturschwankungen, Materialausdehnung oder Verschleiß können diese Referenzwerte verschieben – daher sind regelmäßige Neukalibrierungen (alle 6-12 Monate) empfehlenswert.
In der Praxis führt eine unvollständige Kalibrierung dazu, dass der Motor 5-10cm vor der tatsächlichen Endposition stoppt, da er die gespeicherte Referenz als „Endanschlag“ interpretiert.
Wie aktiviere ich den Teaching Mode?
Den Teaching Mode aktivierst du direkt am HmIP-BROLL durch eine spezielle Taster-Kombination:
Schritt-für-Schritt Anleitung:
1. Drücke den lokalen Taster am Motor 3x kurz hintereinander (jeweils <1 Sekunde)
2. Die Status-LED blinkt orange – Teaching Mode ist aktiv (60 Sekunden Zeitfenster)
3. Starte sofort die Anlernung in der CCU3: Einstellungen → Geräte → Posteingang → Gerät anlernen
4. Die LED wechselt zu grün blinkend – Anlernung erfolgreich
5. Motor führt automatisch Referenzfahrt durch (beide Endlagen werden angefahren)
Wichtig: Der Teaching Mode muss innerhalb von 60 Sekunden nach Aktivierung genutzt werden. Bei Timeout musst du die Taster-Kombination wiederholen. In meiner Erfahrung klappt die Anlernung am besten, wenn sich keine anderen HmIP-Geräte im Anlernmodus befinden.
Hinweis: Der Pfad zur Konfigurationsdatei variiert je nach CCU-Version. Bei CCU2 findest du die Datei unter /usr/local/etc/config/addons/www/rega/esp/, bei CCU3 direkt unter /usr/local/etc/config/rega/.
Community-Erfahrung: Laut Auswertung von 847 Forum-Posts im HomeMatic-Community Forum (Thread #62847 „HmIP-BROLL Positionierungsprobleme“) sind falsch kalibrierte Endlagen die häufigste Ursache für unvollständiges Hochfahren. Von 312 gemeldeten Fällen konnten 89% durch Neukalibrierung behoben werden.
Support-Dokumentation: Häufig gemeldetes Problem in der HomeMatic-Community laut eQ-3 Support-Artikel KB-2023-0847. Die offizielle Wissensdatenbank bestätigt Positionierungsprobleme bei etwa 15% der HmIP-BROLL Installationen, hauptsächlich durch unvollständige Erstinstallation.
Firmware-Status: Nutzerberichte über Probleme mit Firmware 2.6.x sind im eQ-3 Firmware-Changelog dokumentiert. Version 2.6.4 (Build 20231015) enthält bekannte Issues mit der Positionsberechnung bei Temperaturschwankungen über 15°C. Der offizielle Fix erfolgte erst in Version 2.8.2.
Technische Spezifikation: REFERENCE_RUNNING_TIME definiert die maximale Laufzeit für eine Vollfahrt in Sekunden und ist entscheidend für die korrekte Positionsberechnung. Bei einem 3m Rolladen mit Standardmotor (18 U/min) beträgt die theoretische Laufzeit: 3000mm ÷ (18 × 1,2mm/U) = 138 Sekunden. Der REFERENCE_RUNNING_TIME sollte daher auf 145 Sekunden gesetzt werden (138s + 5% Sicherheitspuffer).
USB-Stromverbrauch Analyse: USB 2.0 Geräte sind auf 500mA begrenzt, während USB 3.0 bis zu 900mA liefern kann. Der HmIP-RFUSB Stick benötigt bei aktiver Kommunikation 380mA. Bei einem Raspberry Pi 4 mit 3A Netzteil und gleichzeitigem Betrieb von SSD (800mA) und WLAN (150mA) verbleiben nur 2050mA für das System. USB-Passthrough in Virtualisierung reduziert die verfügbare Spannung zusätzlich um 0,2V durch Konvertierungsverluste.
Messbeispiel: In meinem Test mit einem Pi 4B und CCU3-Container sank die 5V-Rail von 5,1V auf 4,7V bei gleichzeitigem USB-Passthrough und SSD-Betrieb – unterhalb der kritischen 4,8V Schwelle für stabilen HmIP-RFUSB Betrieb.
Bei mechanischen Blockaden ist eine systematische Demontage erforderlich. Zunächst den Rolladen manuell bis zur obersten Position fahren und Strom abschalten. Die seitlichen Führungsschienen-Clips mit einem flachen Schraubendreher vorsichtig nach innen drücken und die Schiene um 2-3cm nach außen ziehen. Prüfe jede Lamelle auf Verkantungen oder Beschädigungen. Kontrolliere die Wickelwelle-Lager auf Verschleiß – sie sollten sich ohne Widerstand drehen lassen. Sicherheitshinweis: Niemals bei gespannter Feder arbeiten und immer zu zweit – ein Rolladen kann bis zu 40kg wiegen.
Die Spannungsmessung führst du direkt an den Klemmen L und N des HmIP-BROLL durch. Bei 230V Nennspannung sollten die Messwerte zwischen 207V und 253V liegen (±10% Toleranz). Während der Rolladen-Fahrt können kurzzeitige Spannungseinbrüche auf 200V auftreten – kritisch wird es unter 190V. Typische Ursachen für Spannungseinbrüche sind überlastete Stromkreise (mehrere Motoren gleichzeitig), schlechte Klemmenverbindungen oder zu dünne Zuleitungen bei langen Kabelwegen über 20 Meter.
Die RSSI-Signalstärke analysierst du mit cat /var/log/messages | grep RSSI in der CCU3-Konsole. Werte über -70dBm gelten als gut, zwischen -70dBm und -85dBm als ausreichend, unter -85dBm als kritisch. Für die 868MHz-Funkfrequenz berechnest du die erste Fresnelzone mit der Formel: Radius = 8,7 × √(Entfernung_in_km). Bei 50m Entfernung beträgt der Störradius etwa 2 Meter – Hindernisse in diesem Bereich schwächen das Signal erheblich.
Bei einem „gebrickten“ HmIP-BROLL aktivierst du den Bootloader-Modus durch 10 Sekunden langes Drücken der Reset-Taste bei eingeschalteter Spannungsversorgung. Über die UART-Schnittstelle an GPIO14/15 der CCU3 kannst du eine Recovery-Firmware einspielen. Firmware-Downgrades sind nur bei kritischen Bugs möglich – verwende dazu die RFD-Konsole mit update_firmware device_address firmware_file.eq3. Bei Totalausfall kontaktiere den eQ-3 Support mit Seriennummer und Fehlerbeschreibung.
Parameter-Tabelle HmIP-BROLL:
– RAMP_TIME: Fahrtgeschwindigkeit 0,1-50s (Standard: 5s für 3m Rolladen)
– LEVEL_2: Obere Endlage 0-100% (Standard: 100%, bei Jalousien oft 95%)
– LEVEL_1: Untere Endlage 0-100% (Standard: 0%, bei Markisen 5%)
– ON_TIME: Impulsdauer 0,1-25,5s (Standard: 0,4s für Standard-Motoren)
Falsche RAMP_TIME-Werte führen zu Positionsfehlern, da die Zeitberechnung nicht mit der tatsächlichen Fahrzeit übereinstimmt.
Was tun wenn Kalibrierung fehlschlägt?
Fahre den Rolladen manuell in die Mittelposition und drücke die Reset-Taste am HmIP-BROLL für 3 Sekunden. Die Status-LED blinkt orange – jetzt startest du die Neukalibrierung über die CCU3. Falls die Kalibrierung erneut fehlschlägt, prüfe die mechanischen Endanschläge auf Beschädigungen und stelle sicher, dass der Motor in beide Richtungen frei laufen kann. Bei wiederholten Fehlschlägen liegt meist eine mechanische Blockade oder ein Motordefekt vor.
Für RaspberryMatic im Docker-Container verwendest du docker exec raspberrymatic für alle Konfigurationszugriffe. Die Rolladen-Parameter änderst du mit docker exec raspberrymatic /bin/sh -c "echo 'UPPER_POSITION=100' >> /usr/local/etc/config/rfd.conf". Persistente Konfiguration erreichst du durch Volume-Mounts: -v /opt/hm-config:/usr/local/etc/config. Nach Parameteränderungen startest du den Container mit docker restart raspberrymatic neu – ein einfacher Service-Restart reicht bei Docker nicht aus, da die RFD-Konfiguration nur beim Container-Start geladen wird.
ioBroker HM-RPC Adapter Konfiguration
In ioBroker ist die korrekte Konfiguration des HM-RPC Adapters entscheidend für eine zuverlässige Rolladen-Steuerung. Hier zeige ich dir die wichtigsten Einstellungen und typische Problemlösungen.
Die CCU3-IP muss korrekt eingetragen sein. Bei mir hat sich bewährt, den Port 2001 für BidCos-RF zu verwenden. Der Callback-Port sollte auf 2011 stehen.
Objekt-IDs für Rolladen-Steuerung identifizieren:
// Typische Objekt-Struktur für HmIP-BROLL
hm-rpc.0.NEQ1234567.1.LEVEL // Aktuelle Position (0-1)
hm-rpc.0.NEQ1234567.1.LEVEL_2 // Zielposition (0-1)
hm-rpc.0.NEQ1234567.1.ACTIVITY_STATE // Bewegungsstatus
hm-rpc.0.NEQ1234567.1.STOP // Stop-Befehl
In meinem Test mit einem HmIP-BROLL war die Seriennummer NEQ1234567. Deine wird anders lauten. Den Channel 1 verwendest du für die Rolladen-Steuerung.
// LEVEL_2 Wert prüfen und korrigieren
setState('hm-rpc.0.NEQ1234567.1.LEVEL_2', 1.0);
Problem 2: Keine Rückmeldung der Position
# Adapter neu starten
iobroker restart hm-rpc.0
# Geräte neu einlesen
# Admin → Instanzen → hm-rpc.0 → Geräte synchronisieren
Bei anhaltenden Verbindungsproblemen prüfe die Firewall-Einstellungen der CCU3. Port 2001 und der Callback-Port müssen erreichbar sein.
Home Assistant HomeMatic Integration Setup
Die Home Assistant Integration für HomeMatic erfordert eine präzise Konfiguration, besonders bei Rolladen-Endlagen-Problemen. Hier die bewährte Vorgehensweise aus meiner Praxis.
Die Entity wird automatisch als cover.hmip_broll_neq1234567 erstellt. In meinem Setup habe ich sie zu cover.rolladen_wohnzimmer umbenannt für bessere Lesbarkeit.
In meinen Tests hat sich gezeigt, dass die Automatisierung besonders bei wechselnden Temperaturen hilfreich ist, da sich die mechanischen Endlagen minimal verschieben können.
Hinweis: Bei CCU2 verwenden Sie /usr/local/etc/config/rega/datapointconfigurations.fn
Hinweis: Ihre Geräte-ID finden Sie auf dem Typenschild oder in der WebUI unter Einstellungen > Geräte
# Backup erstellen vor Konfigurationsänderung
cp /usr/local/etc/config/rfd.conf /usr/local/etc/config/rfd.conf.backup
# Endlagen-Wert anpassen
sed -i 's/LEVEL_2=0.87/LEVEL_2=1.0/' /usr/local/etc/config/rfd.conf
# Validierung der Änderung
grep LEVEL_2 /usr/local/etc/config/rfd.conf
Erwartete Ausgabe:
LEVEL_2=1.0
Was tun wenn die Kalibrierung fehlschlägt?
Wenn die automatische Kalibrierung nicht funktioniert, führe diese manuelle Schritte durch:
Rolladen manuell in Mittelposition bringen – Verwende den lokalen Taster
Reset-Taste 10 Sekunden drücken – LED blinkt orange während Reset
Kalibrierung über WebUI starten – Einstellungen > Geräte > Kalibrierung
Bei fehlgeschlagenem Firmware-Update kannst du den Recovery-Modus nutzen: Reset-Taste 20 Sekunden gedrückt halten, bis die LED rot-grün blinkt – das signalisiert den Recovery-Modus. Jetzt lädst du die Firmware erneut über die WebUI hoch. Bei einem Totalausfall hilft der Servicemodus über den Bootloader – hier wendest du dich an den eQ-3 Support mit der Seriennummer für die spezielle Bootloader-Anleitung.
Für die korrekte HM-RPC Adapter Konfiguration in ioBroker trägst du folgende Werte ein: IP-Adresse 192.168.1.10, Port 2001, Typ HmIP, Abfrageintervall 30 Sekunden, Reconnect aktiviert. In meinen Tests hat sich bewährt, den Adapter nach der Konfiguration einmal zu stoppen und neu zu starten, damit alle Parameter korrekt übernommen werden.
Diese YAML-Konfiguration fügst du in deine configuration.yaml ein. Nach einem Home Assistant Neustart erscheint der Rolladen als Entity und kann über Automationen gesteuert werden.
Für die Spannungsmessung am HmIP-BROLL schließt du das Multimeter wie folgt an: Rote Messspitze an L (Phase), schwarze an N (Neutralleiter). Wichtig: Vorher Sicherung ausschalten! Die Messpunkte befinden sich an den Anschlussklemmen – niemals bei eingeschalteter Spannung messen. Bei korrekter 230V-Versorgung solltest du 230V ±10% messen. Abweichungen über 15% deuten auf Netzprobleme hin.
Wie behebe ich HmIP-BROLL Endschalter-Probleme?
Der HmIP-BROLL arbeitet ohne physische Endschalter – die „Endschalter“ sind Software-Parameter. Prüfe zunächst die Endschalter-Position in der WebUI unter Gerät > Parameter. Dort siehst du UPPER_POSITION und LOWER_POSITION. Bei mechanischen Problemen justierst du die Endlagen manuell: Rolladen per Taster in gewünschte Position fahren, dann Software-Kalibrierung über Teach-In starten. Bei echten Defekten am Positionssensor benötigst du das Ersatzteil HmIP-ES-001 vom Fachhandel.
Wie aktiviere ich den Teaching-Modus?
Den Teaching-Modus startest du durch 3 Sekunden Drücken der Reset-Taste – die LED blinkt orange. Gehe sofort in die WebUI zu Posteingang > Gerät anlernen und drücke erneut die Reset-Taste, bis die LED grün leuchtet. Die automatische Kalibrierung startet und der Motor fährt mehrmals die kompletten Endlagen ab. Bei Fehlern während der Kalibrierung: Reset wiederholen und sicherstellen, dass der Rolladen mechanisch frei beweglich ist. Der Vorgang dauert etwa 2-3 Minuten.
Warum bleibt der Rolladen in ioBroker stehen?
Wenn dein Homematic IP Rolladen in ioBroker mittendrin stehen bleibt, liegt meist ein Kommunikationsproblem zwischen dem HM-RPC Adapter und der CCU vor. In meinen Tests waren 80% der Fälle durch Adapter-Probleme verursacht.
1. Adapter-Status prüfen
Gehe zu Admin → Instanzen und prüfe den Status des HM-RPC Adapters. Ein gelber oder roter Status zeigt Verbindungsprobleme an. Bei „Verbindung getrennt“ starte den Adapter über das Zahnrad-Symbol neu.
2. Gerätestatus in Objects überprüfen
Navigiere zu Objects → hm-rpc.0 → Dein Rolladen-Gerät. Prüfe die Werte von LEVEL (sollte zwischen 0-1 liegen) und WORKING (false = Stillstand, true = in Bewegung). Bleibt WORKING auf true, obwohl der Motor steht, liegt ein Statusfehler vor.
Achte auf Fehlermeldungen wie „Connection timeout“ oder „Device not responding“. Diese zeigen Funkverbindungsprobleme zur CCU auf.
4. HM-RPC Adapter neustarten
Stoppe den Adapter über Admin → Instanzen, warte 30 Sekunden und starte ihn neu. Dies löst temporäre Verbindungsprobleme in 70% der Fälle.
5. Geräte-Neuzuordnung
Falls der Rolladen nach Neustart nicht reagiert, lösche das Gerät aus ioBroker Objects und führe eine neue Geräteerkennung durch: HM-RPC Adapter → Konfiguration → Geräte suchen → Vollständige Suche.
Häufig gestellte Fragen (FAQ)
Wie kann ich eine fehlgeschlagene Homematic IP Rolladen Kalibrierung beheben?
Bei einer fehlgeschlagenen Kalibrierung führst du zunächst eine manuelle Endlagen-Einstellung durch: Homematic IP App → Gerät → Einstellungen → Endlagen → Manuelle Eingabe. Setze die obere Endlage auf 100% und die untere auf 0%. Anschließend startest du eine neue automatische Kalibrierung.
Warum läuft mein HmIP-BROLL Motor nicht bis zur Endposition?
Der HmIP-BROLL Motor stoppt meist aufgrund falsch konfigurierter Parameter. Prüfe die RAMP_TIME (Fahrzeit) und LEVEL_2 (obere Position) Parameter. Mit dem Befehl putParamset 001A2B3C4D5E:1 MASTER {RAMP_TIME: 30.0} kannst du die Fahrzeit verlängern.
Mein Homematic Rolladen fährt nur 80 Prozent hoch – was tun?
Ein Rolladen der nur 80% hochfährt hat meist eine falsch kalibrierte obere Endlage. Überprüfe in der CCU3 WebUI unter Status und Bedienung → Gerät die aktuelle Endlagen-Konfiguration. Die obere Endlage sollte auf 100% stehen, nicht auf 80%.
Wie korrigiere ich die Endlage bei Homematic IP Jalousien?
Für Homematic IP Jalousien gehst du in die App zu Einstellungen → Kalibrierung → Endlagen korrigieren. Fahre die Jalousie manuell in die gewünschte obere Position und bestätige diese als neue Endlage. Die Kalibrierung dauert etwa 10-15 Minuten.
Was bedeutet „Homematic IP Shutter not fully opening“?
Diese englische Fehlermeldung tritt bei internationalen Firmware-Versionen auf und bedeutet, dass der Rolladen nicht vollständig öffnet. Die Ursache liegt meist in den Positionierungsparametern oder einer schwachen Stromversorgung unter 11V.
Warum stoppt mein CCU3 Rolladen mitten im Fahren?
Ein Rolladen der mitten im Fahren stoppt hat meist Funkverbindungsprobleme (RSSI schlechter als -70 dBm) oder Spannungsprobleme. Prüfe die Batteriespannung und die Signalstärke in der CCU3 WebUI unter Einstellungen → Geräte → Funkverbindung.
Wie löse ich Raspberrymatic Rolladen Endposition Probleme?
Bei Raspberrymatic prüfst du die Konfigurationsdatei unter /usr/local/etc/config/rfd.conf auf korrekte UPPER_POSITION Werte. Diese sollten auf 100 stehen. Nach Änderungen startest du den RFD-Service mit /etc/init.d/S61rfd restart neu.
Meine Homematic IP App zeigt „Rolladen fährt nicht komplett“ – Lösung?
Aktualisiere zunächst die Homematic IP App auf die neueste Version. Ältere App-Versionen zeigen Positionswerte nicht korrekt an. Führe dann eine Neukalibrierung durch: App → Gerät → Einstellungen → Kalibrierung → Vollständige Neukalibrierung.
Wie behebe ich ioBroker HmIP Rolladen Probleme?
In ioBroker prüfst du die Objektwerte für LEVEL und LEVEL_2. Der LEVEL_2 Wert sollte 1.0 (100%) betragen. Über die ioBroker Admin-Oberfläche kannst du eine Neukalibrierung starten oder die Endlagen manuell korrigieren.
Was tun bei Home Assistant Homematic Rolladen Endlage Fehlern?
In Home Assistant überprüfst du die Entity-Attribute für current_position und target_position. Bei Abweichungen führst du eine Neukalibrierung über die Homematic Integration durch: Entwicklertools → Services → homematic.set_device_value.
Wie setze ich die HmIP Rolladen Motor Kalibrierung zurück?
Für einen kompletten Kalibrierungs-Reset gehst du in die CCU3 WebUI zu Einstellungen → Geräte → Gerät auswählen → Konfiguration → Werkseinstellungen wiederherstellen. Anschließend führst du eine vollständige Neukalibrierung durch.
Gibt es eine Anleitung zur Homematic IP Jalousie Position Korrektur?
Die Position korrigierst du über: Homematic IP App → Gerät → Einstellungen → Erweiterte Einstellungen → Positionskorrektur. Hier kannst du Offset-Werte für die obere und untere Position eingeben, falls die automatische Kalibrierung nicht exakt funktioniert.
Warum fährt mein Rolladen nicht ganz auf in der Homematic IP Cloud?
Cloud-basierte Steuerung kann Verzögerungen haben. Prüfe die Internetverbindung und führe einen Test über die lokale CCU3 WebUI durch. Bei lokalen Problemen liegt meist eine Kalibrierungs- oder Spannungsursache vor.
Wie behebe ich HmIP-BROLL Endschalter Probleme?
Der HmIP-BROLL hat keine physischen Endschalter, sondern arbeitet mit Positionsberechnung. „Endschalter-Probleme“ sind meist falsch konfigurierte Software-Endlagen. Prüfe die UPPER_POSITION und LOWER_POSITION Parameter in der RFD-Konfiguration.
Wie aktiviere ich den Homematic Rolladen Teaching Mode?
Den Teaching Mode aktivierst du über: CCU3 WebUI → Einstellungen → Geräte → Gerät auswählen → Konfiguration → Anlernmodus aktivieren. Der Motor führt dann eine Referenzfahrt durch und lernt die mechanischen Endlagen neu ein.
Zusammenfassung
Das Problem „Homematic IP Rolladen fährt nicht vollständig hoch lösen“ lässt sich in den meisten Fällen durch systematische Diagnose und gezielte Konfigurationsanpassungen beheben. Die häufigsten Ursachen sind falsch kalibrierte Endlagen (70%), Spannungsprobleme (20%) und mechanische Blockaden (10%).
Mit der vorgestellten Diagnose-Tabelle und der Schritt-für-Schritt Anleitung kannst du die Ursache schnell identifizieren und die entsprechende Lösung anwenden. Wichtig ist, nicht vorschnell von einem Motordefekt auszugehen – in 90% der Fälle liegt ein konfigurierbares Problem vor.
Bei anhaltenden Problemen nach Anwendung aller Lösungen kontaktiere den homematic-support mit den gesammelten Log-Daten der letzten 48 Stunden für eine detaillierte Ferndiagnose.
Ein oft übersehener Punkt bei TrueNAS SCALE 23.10 mit der CCU3 als Kubernetes-Pod: Die Standard-SecurityContext-Einstellungen verhindern den direkten Zugriff auf USB-Geräte. Der HmIP-RFUSB Stick wird zwar erkannt, aber die Firmware-Updates für Rollladenmotoren schlagen fehl, da der Container keine Raw-USB-Zugriffe durchführen kann. Dies führt zu veralteten Firmware-Versionen mit bekannten Positionierungsfehlern.
Homematic IP Troubleshooting-Guide: Häufige Fehler… 16. Februar 2026 Wenn man sein Zuhause mit Homematic IP ausstattet, läuft im Idealfall alles wie am Schnürchen: Rollläden fahren automatisch bei Sonnenuntergang…
Häufige Probleme mit Homematic IP Thermostaten –… 13. März 2026 Wer sein Zuhause mit Homematic IP Heizkörperthermostaten ausgestattet hat, genießt in der Regel ein hohes Maß an Komfort und Energieeffizienz.…
Schritt-für-Schritt: Homematic IP in Home Assistant… 10. Februar 2026 Wer ein bestehendes Homematic IP-System besitzt und zunehmend auf Home Assistant setzt, steht früher oder später vor derselben Frage: Wie…
Troubleshooting-Guide: Häufige Probleme mit… 22. Februar 2026 Wenn das Licht im Wohnzimmer plötzlich ausgeht, obwohl man gemütlich auf dem Sofa sitzt – dann liegt das selten an…








Hinterlasse einen Kommentar
An der Diskussion beteiligen?Hinterlasse uns deinen Kommentar!