RaspberryMatic – CCU2 auslagern auf ASUS Tinkerboard
Seit der aktuellen RaspberryMatic Version 2.29.23.20171022 gibt es für mich eine sehr interessante neue Möglichkeit. Neben den diversen Raspberry Pi Versionen ist es nun auch möglich RaspberryMatic auf dem ASUS Tinker Board (zum Artikel) zu betreiben. Das wollte ich natürlich ausprobieren und habe mir ein solches Board gekauft. In diesem Artikel möchte ich euch beschreiben wie ihr RaspberryMatic auf dieser Plattform installiert und wo die wesentlichen Unterschiede zur Raspberry Pi bestehen. Vielen Dank an Jens Maus und die Community für die Unterstützung dieser sehr interessanten Plattform.
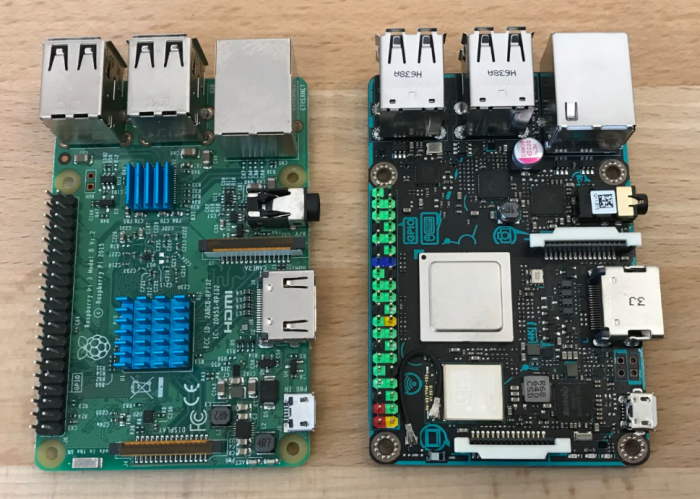
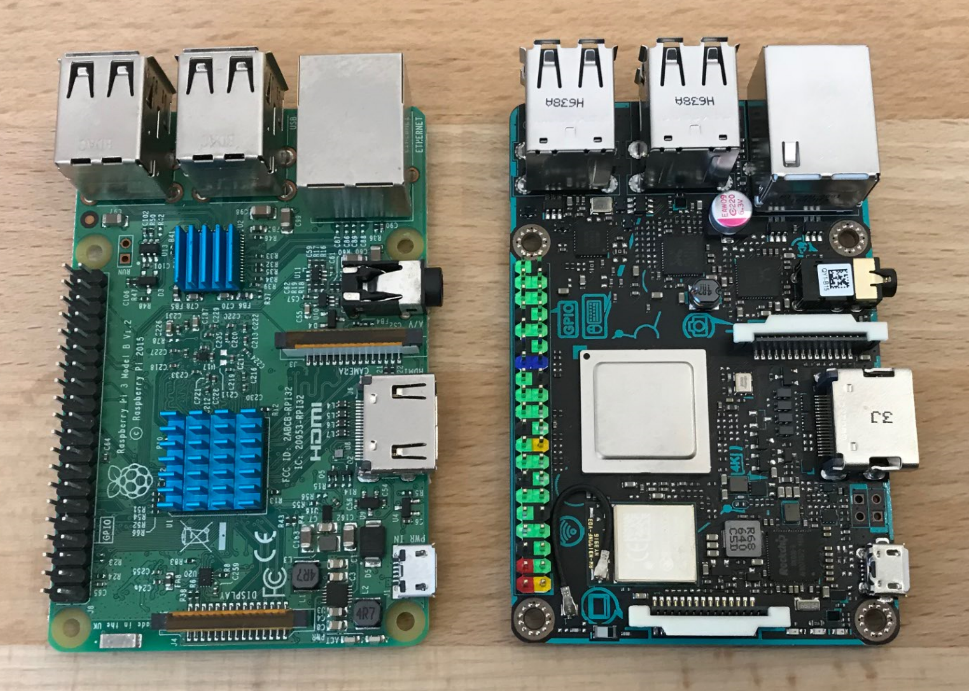
Was auf dem obigen Foto sofort auffällt ist die Tatsache, das der Formfaktor bei beiden Boards absolut identisch ist. Das bedeutet, das alle Schnittstellen genau an der gleichen Stelle verbaut sind. Dadurch ist es möglich alle Gehäuse für den Raspberry Pi auch für das ASUS Tinker Board zu verwenden.
Das Tinker Board hat die Schnittstellen nicht nur an der gleichen Stelle, sondern auch die Ausführung und Anzahl sind identisch. Es gibt vier USB Schnittstellen, leider auch hier noch kein USB 3.0. Ein HDMI Anschluss zählt genauso dazu wie ein Micro USB Anschluss für die Stromversorgung. Neben einem Audio Ausgang ist auch ein RJ45 Ethernet Steckplatz vorhanden, welcher aber mit 1 Gbyte arbeitet. Kompletiert wird das Ganze durch die GPIO Schnittstelle, die wir bei RaspberryMatic für das HomeMatic Funk Modul benötigen. Was mir dabei gut gefällt ist die farbliche Kennzeichnung der Pins. Mittels des mitgelieferten kleinen Handbuches oder über die Internet Präsenz ist eine Zuweisung der Pins so sehr leicht möglich.
[quads id=5]
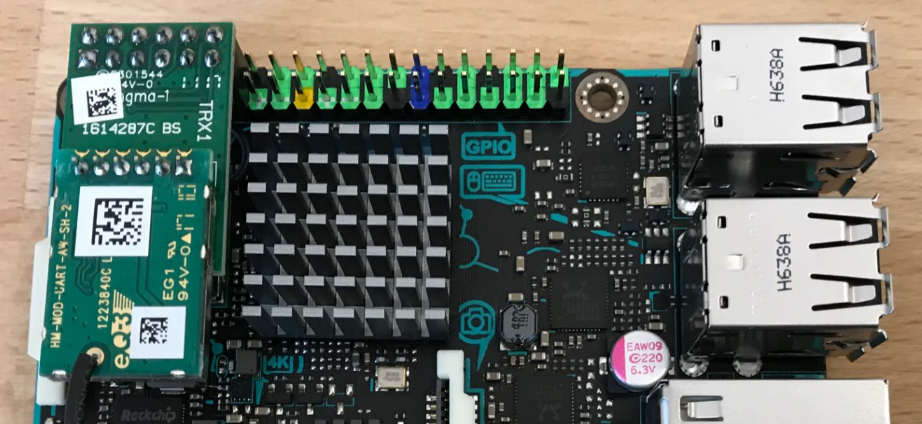
Was auch sofort ins Auge fällt ist die andere Plazierung der CPU und des Chips für 802.11 b/g/n Wi-Fi, Bluetooth 4.0. Die CPU wirkt wesentlich größer, was sich auch durch den mitgelieferten Kühlkörper zeigt. Dieser ist auch deutlich höher als vergleichbare Kühlkörper für die Raspberry Pi, was allerdings in Bezug auf die Montage des HomeMatic Funk Modules kein Problem darstellt. Dies liegt an der anderen CPU Position, denn dadurch befindet sich der Kühlkörper neben dem Funkmodul und nicht darunter, was nicht klappen würde.
Der Kühlkörper sitzt neben dem HomeMatic Funkmodul
Auch die Höhe des Kühlkörpers spielt keine Rolle – Passt.
Was im Betrieb nach kurzer Zeit auffällt, ist die Tatsache dass das ASUS Tinker Board im Vergleich zur Raspberry Pi3 deutlich wärmer wird. Dadurch geschuldet wahrscheinlich auch der deutlich größere und im Lieferumfang befindliche Kühlkörper.
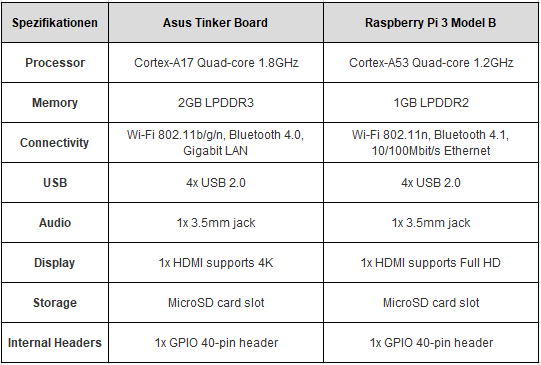
Was das ASUS Tinker Board als Einplatinen Computer sehr interessant macht, sind die inneren Werte. Diese stelle ich nachfolgend im Vergleich zur Raspberry Pi3 vor.
Wie aus der Tabelle zu entnehmen ist sind die wesentlichen Unterschiede die schnellere CPU, sowie der schnellere und doppelt so große Speicher beim Tinkerboard. Auch die Geschwindigkeit der Netzwerkschnittstelle ist beim Tinkerboard mit Gigabit Lan erheblich schneller als die 100 Mbit/s beim Raspberry.
Als USB Norm haben beide Boards noch USB 2.0 und ich bin der Meinung hier würde einem neueren Board auch USB 3.0 gut stehen. Für den Betrieb von RaspberryMatic ist das nicht unbedingt erforderlich, aber das Board kann ja auch für andere Anwendungen eingesetzt werden und dort wäre es von Vorteil.
[quads id=5]
Noch ein paar Worte zum HDMI Anschluss, der laut der obigen Tabelle beim Tinkerboard eine Auflösung von 4K aufweist. Dazu muss man aber wissen, das es sich dabei nicht um ein echtes HDMI 2.0 handelt, sondern um ein hochskaliertes HDMI 1.4. Das ist für RaspberryMatic auch nicht von Bedeutung, aber hat bei einigen Anwendern welche das Board zum Video Streaming verwenden wollten, für Ernüchterung gesorgt.
Ich werde in einem späteren Artikel noch gesondert auf die Performance eingehen. Hier möchte ich nun zum eigentlichen Thema, nämlich der Installation von RaspberryMatic auf dem ASUS Tinkerboard eingehen.
Hardware Installation
Was wie bei einer Raspberry ebenfalls benötigt wird, ist das Raspberry Funkmodul, welches es nur als Bausatz zu kaufen gibt. Wenn ihr bereits euer RaspberryMatic auf einer Raspberry laufen habt, seid ihr schon im Besitz eines solchen Moduls. Dann könnt ihr es einfach umstecken auf das Tinkerboard. Wenn ihr noch keines besitzt, müsst ihr euch den Bausatz besorgen und dann wie beschrieben zusammen bauen (löten).
Bausatz:
Der Bausatz besteht auf einer handvoll Teile, die in kurzer Zeit zusammengelötet sind. Solltet Ihr keinen Lötkolben haben, oder einfach keine Lust haben, zu löten, dann schreibt uns an. Wir helfen Euch hier gerne.
Hier noch ein paar Bilder + Tipps für den Zusammenbau:
Sebastian hat das in seinem Artikel CCU2 auf einen Raspberry Pi auslagern sehr gut beschrieben und ich bediene mich hier seiner Bilder. Danke dafür Sebastian.
Zuerst solltet ihr die beiden Platinen aneinander löten, dann habt Ihr es anschließend einfacher. Als provisorische Unterlage könnt Ihr die Stiftleiste verwenden, die im nächsten Schritt angelötet werden muss. Achtet auch darauf, dass genügen Hitze an den Lötpunkten ankommt, damit keine kalten Lötstellen entstehen.
Zum Schluss empfiehlt es sich, den beiliegenden Ferritkern noch zu verwenden. Das Ende vom Kabel (USB-Netzteil) wickelt ihr 3-4x um den Kern. So können Störungen, die sich negativ auf die Antennenleistung auswirken können, gefiltert.
Netzteil
Eine sehr wichtige Rolle spielt nicht nur bei einer Raspberry Pi ein gutes Netzteil. Das Tinkerboard arbeitet auch mit dem Original Raspberry Netzteil sehr stabil. Ich habe mich aber aktuell für das folgende Netzteil entschieden:
Die Gründe für diese Entscheidung sind zum einen, das es sich um eine 3A Netzteil handelt und weil ich gelesen habe, dass das Tinkerboard für eine stabile Funktion ein stärkeres Netzteil benötigt. Zusätzlich finde ich den Ein-/Ausschalter sehr gut. Das finde ich besser als das Netzteil immer aus der Steckdose zu ziehen. Noch schlimmer ist es den Micro-USB Stecker immer wieder raus und rein zu stecken. Weil diese Buchse ist ziemlich filigran.
[quads id=5]
Das waren die Schritte, die wir bei der Hardware-Installation beachten müssen. Nun können wir zur Software übergehen.
RaspberryMatic Image für Tinkerboard
Wie bereits bei der Unterstützung für andere Raspberry Pi Systeme wie beispielsweise die Zero wird nun auch für Tinkerboard ein spezielles Image angeboten.
Auf der folgenden Seite findet ihr jeweils die aktuellen RaspberryMatic Images:
Nachdem ihr die ZIP Datei heruntergeladen habt, müsst ihr die enthaltene Image Datei extrahieren. Um diese Imagedatei auf die SD-Karte zu schreiben, existieren mehrer Möglichkeiten. Ihr könnt für Windows zwischen der Software Win32 Disk Imager oder Etcher wählen. Für MacOS ist es mit ApplePi-Baker möglich.
Nach dem Erstellen des RaspberryMatic auf der MicroSD-Karte könnt ihr diese in die entsprechende Schnittstelle des Tinkerboards einstecken.
Diese Schnittstelle ist beim Tinkerboard wie beim Raspberry Pi2 mit dem Federmechanismus ausgestattet. Diese Schnittstelle finde ich persönlich besser als die auf der Raspberry Pi3, wo der Hersteller auf die Feder verzichtet hat.
Erster Start auf dem Tinkerbard
Aufgrund bestimmter bei mir aufgetretenen Schwierigkeiten beim ersten Start, empfehle ich sowohl eine Tastatur als auch einen Monitor anzuschließen. Erklärung folgt in diesem Absatz.
Jetzt solltet Ihr zuerst das Netzwerkkabel einstecken und dann erst den Stecker für die Spannungsversorgung.
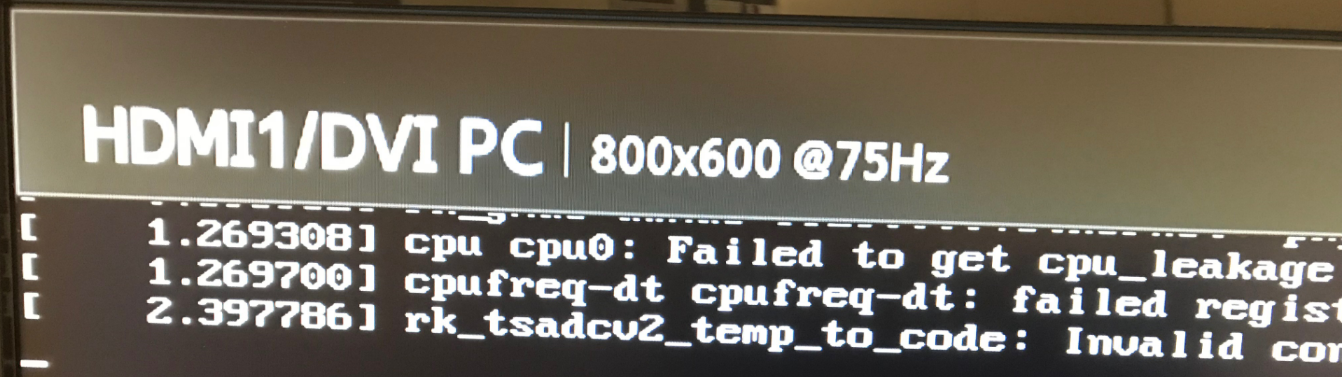
Nach dem Einstecken oder Einschalten des Netzteils startet das Tinkerboard. Nach wenigen Sekunden erscheint auf dem Bildschirm die folgende Fehlermeldung für ein paar Sekunden. Danach wird der Bildschirm Inhalt bis auf das Raspberry Logo gelöscht und bleibt in diesem Zustand stehen. (Ich habe es auf zwei Tinkerboards probiert und beide haben sich gleich verhalten)
Fehlermeldungen – die oberen kann ich nicht sehen, weil sie vor der Anzeige der Auflösung verschwinden.
Damit ist auch der Grund für einen Monitor bereits erklärt. Die Tastatur benötigt ihr genau an dieser Stelle auch, um die Tastenkombination „ALT + F2“ zu drücken.
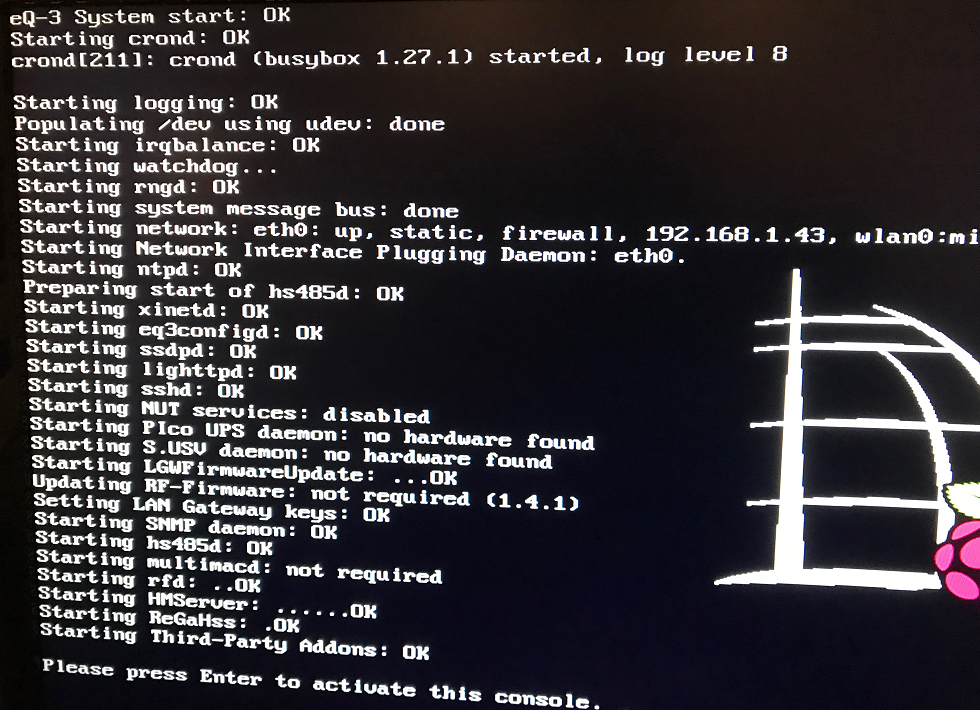
Danach könnt ihr auf dem Bildschirm verfolgen wie RaspberryMatic startet. Das dauert nur ein paar Sekunden. Auf dem Monitor steht dann auch die IP-Adresse welche vom DHCP vergeben wurde. Entweder so oder über euren Router könnt ihr die IP-Adresse ermitteln um das neue RaspberryMatic zu starten. Eine weiter Möglichkeit ist den folgenden Link zu verwenden http://homematic-raspi/ . Ihr kommt dann sehr fix auf die WebUI Startseite.
Hier seht ihr den anschließenden Boot Vorgang mit der IP-Adresse
Wenn ihr nun über die WebUI die Funktion Neustart auswählt, beendet sich die RaspberryMatic Applikation sauber und startet danach auch ohne die oben beschriebenen Probleme. Ich konnte nicht ermitteln was die Ursache für dieses Problem ist. Habe diverse Netzteile und Micro-SD Karten verwendet. Aber das Problem tauchte zumindest mit meiner Hardware immer wieder auf bei Starten nach dem Einschalten vom Strom.
Danach läuft RaspberryMatic einwandfrei und fehlerlos auf dem ASUS Tinkerboard. Subjetiv gesehen habe ich das Gefühl das es auch noch einmal schneller läuft wie auf der Raspberry Pi3. Dem werde ich aber in einem weiteren Artikel mittels eines Performancevergleich genauer nachgehen.
Datenübernahme von CCU2 oder Raspberry
Wichtig: Die aktuelle RaspberryMatic Version für Tinkerboar unterstützt noch keine HomeMatic IP Komponenten. An einer Lösung wird gearbeitet und wenn ihr HomeMatic IP Aktoren einsetzt, könnt ihr aktuell noch nicht auf das Tinkerboard umsteigen.
Ich habe für diesen Test hier meine HomeMatic IP Komponenten gelöscht, um weiter zu kommen und berichten zu können.
Wenn ihr von der CCU2 kommt
Schritt 01
Bevor ihr die Daten von eurer CCU2 übernehmen könnt, müsst ihr auf diesem System natürlich eine Datensicherung durchführen. Die Firmware-Versionen sollten dabei die Gleichen sein!
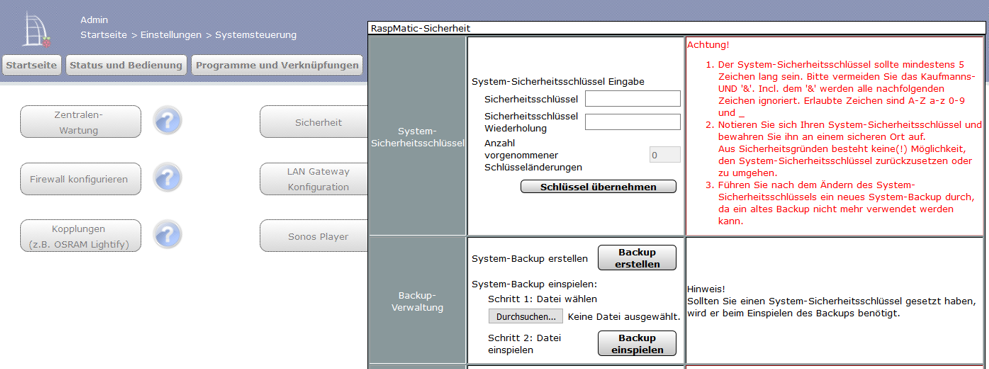
Hier könnt ihr einen Backup erstellen und später wieder einspielen
Im oben zu sehenden Menü klickt Ihr auf den Menüpunkt „Backup erstellen“. Dieser Vorgang dauert einige Minuten. Die erstellte Backupdatei an einem sicheren Ort abspeichern, um es später wieder in die CCU2 einspielen zu können.
Schritt 02
In diesem Backup sind dann auch alle AddOns enthalten. Da aber für RaspberryMatic angepasste AddOns erforderlich sind, werden diese gesicherten im RaspberryMatic nicht laufen.
Darum müsst ihr unter: > Einstellungen > Systemsteuerung > Zusatzsoftware
alle installierten AddOns deinstallieren. Keine Sorge, durch die unter Schritt 1 erstellte Sicherung können wir sie später wieder vollständig hergestellen.
Jetzt erstellen wir einen 2. Backup für unser RaspberryMatic. Dazu gehen wir genauso vor wie unter Schritt 01.
Dieser 2. Backupdatei solltet ihr einen anderen Namen geben, damit ihr in jederzeit von der ersten Datensicherung unterscheiden könnt. Bitte ebenfalls an einem sicheren Ort abspeichern!
Schritt 03
Die CCU2 solltet ihr jetzt ausschalten (vom Strom trennen). Es wäre zwar möglich mehrere Zentralen in einem Netzwerk zu betrieben, aber sie sollten nicht die gleichen Aktoren verwenden. Ausserdem wenn ihr in HomeMatic eine feste IP-Adresse vergeben habt, wären zwei Zentralen mit der gleichen IP-Adresse im Netz. Das führt zu Konflikten.
Ich habe in der Zwischenzeit drei HomeMatic Zentralen in meinem Netzwerk, eine CCU2, eine Raspberry Pi3 und jetzt noch eine Tinkerboard. Alle drei haben aber eine anderen feste IP-Adresse und einen anderen Namen. Natürlich auch nicht die gleichen Aktoren.
Im nächsten Schritt spielt ihr jetzt das 2. Backup, welches wir erstellt haben, im neuen RaspberryMatic auf dem Tinkerboard Pi ein.
Wenn dies noch nicht geschehen ist, könnt ihr die WebUi von RaspberryMatic öffnen, indem ihr den folgenden Link verwendet http://homematic-raspi/
Bei diesem Vorgang werdet ihr gleich merken wie viel schneller das Tinkerboard ist, denn das läuft wesentlich schneller als auf der CCU2.
Nun müsst ihr (bei Bedarf) die zuvor auf der CCU2 gelöschten AddOns wieder installieren. Diesmal natürlich die Versionen für RaspberryMatic, welche ihr unter dem folgenden Link findet:
Damit ist der Umstieg auf RaspberryMatic auf einem ASUS Tinkerboard beendet. Ihr werden beim arbeiten in der WebUI sofort feststellen wie gewaltig der Geschwindigkeitsunterschied ist, wenn man vorher auf der CCU2 gewesen ist.
Wenn ihr von einer Raspberry Pi kommt
Dieser Vorgang ist natürlich deutlich einfacher, weil ihr bereits im RaspberryMatic arbeitet. Damit gibt es die Probleme mit den AddOns nicht und eine Sicherung reicht vollkommen aus.
Schritt 01
Bevor ihr die Daten von eurer Raspberry Pi übernehmen könnt, müsst ihr auf diesem System natürlich eine Datensicherung durchführen. Die Firmware-Versionen sollten dabei die Gleichen sein!
Hier könnt ihr einen Backup erstellen und später wieder einspielen
Schritt 02
Die Raspberry Pi solltet ihr jetzt ausschalten (vom Strom trennen). Es wäre zwar möglich mehrere Zentralen in einem Netzwerk zu betrieben, aber sie sollten nicht die gleichen Aktoren verwenden. Ausserdem wenn ihr in HomeMatic eine feste IP-Adresse vergeben habt, wären zwei Zentralen mit der gleichen IP-Adresse im Netz. Das führt zu Konflikten.
Im nächsten Schritt spielt ihr jetzt den Backup aus Schritt 01 im neuen RaspberryMatic auf dem Tinkerboard Pi ein.
Wenn dies noch nicht geschehen ist, könnt ihr die WebUi von RaspberryMatic (Tinkerboard) öffnen, indem ihr den folgenden Link verwendet http://homematic-raspi/
Dieser Vorgang wird sehr schnell abgeschlossen sein, weil das Tinkerboard nochmal einen Ticken schneller ist wie die Raspberry Pi3..
Damit ist der Umstieg auf RaspberryMatic auf einem ASUS Tinkerboard beendet. Gefühlt ist RaspberryMatic auf dem Tinkerboard noch einmal ein wenig flotter wie auf einem Raspberry Pi. Ich werde aber in einem weiteren Artikel einen Performance Vergleich anstellen.
Empfang verbessern
Bei meiner CCU2 und Raspberry Pi habe ich den Empfang durch eine externe Antenne deutlich verbessern können. Bei beiden Zentralen habe ich die folgende externe Antenne im Einsatz und diese kann ich wirklich empfehlen.
[quads id=5]
Wie man eine externe Antenne installiert, hat Sebastian in folgenden Artikeln sehr gut erklärt:
Kein HomeMatic-IP Support bei Nutzung des HM-MOD-RPI-PCB Funkmoduls mit einem ASUS Tinkerboard (-> In Arbeit)
Kein Onboard Bluetooth/WLAN Support mit einem ASUS Tinkerboard (->In Arbeit)
Fazit
Abschließend möchte ich folgendes Zusammenfassen. Die Installation von RaspberryMatic lief absolut problemlos. Lediglich bei Start des Tinkerboards hatte ich die beschriebenen Probleme, die mit der aufgezeigten Lösung ignoriert werden kann. Ich kann aktuell noch nicht abschließen sagen woran dieses Problem liegt.
Fakt ist allerdings das es keinerlei Einfluss auf den Betrieb von RaspberryMatic auf einem ASUS Tinkerboard hat.
Das bisherige Arbeiten in der WebUI ist problemlos, fehlerfrei und gefühlt auch noch schneller als auf einer Raspberry Pi3. Wie schon gesagt werde ich noch einen Performance Vergleich durchführen und hier darüber berichten.
Aufgrund der Einschränkung mit den HomeMatic IP Komponenten kommt es für mich aktuell noch nicht als produktives System in Frage. Weil ich habe einige IP Komponenten im Einsatz und es ist zu erwarten das alle neuen Aktoren nur noch in der HomeMatic IP Serie erscheinen werden, wie sich die letzten Monate schon gezeigt hat.
Aber ich bin zuversichtlich das in einer der nächsten RaspberryMatic Version diese HomeMatic IP Unterstützung umgesetzt ist.
WLAN und Bluetooth benötige ich im Augenblick nicht, daher kein Problem.
Das ASUS Tinkerboard ist eine interessante Hardware Alternative zum Raspberry Pi und von den reinen Zahel her auch überlegen. Es muss allerdings seine Zuverlässigkeit noch beweisen. Ich vermute das mit einem neuen Raspberry Pi auf diese Herausforderung reagiert wird, was für den Anwender von Vorteil ist.
Das könnte dich auch interessieren
Homematic CCU2 kaufen auf CCU3 migrieren: Komplette… 3. April 2026 Die CCU2 zu CCU3 Migration erfordert eine systematische Herangehensweise, um Geräteverluste zu vermeiden Die Homematic CCU2 zu CCU3 Migration kaufen…
Homematic Wired Bus Terminierung mit Fluke 115… 3. April 2026 Präzise Multimeter-Messung zeigt korrekte 120 Ohm Terminierung zwischen Bus+ und Bus- Klemmen Die Homematic Wired Bus Terminierung mit Multimeter prüfen…
Smart Home Sicherheitssystem für Einsteiger ohne… 6. April 2026 Professionelles Smart Home Sicherheitssystem Dashboard mit Live-Kamera-Feeds und Sensor-Status-Übersicht Ein Smart Home Sicherheitssystem für Einsteiger ohne Vorkenntnisse ist wie ein…
https://technikkram.net/wp-content/uploads/2017/11/Tinker000-e1516528611924.png499700Wernerhttps://technikkram.net/wp-content/uploads/2019/05/technikkram_transparent.pngWerner2017-11-11 08:13:092017-11-15 11:55:33RaspberryMatic – CCU2 auslagern auf ASUS Tinkerboard
8Kommentare
Rainer sagte:
Hallo Werner,
zuerst einmal vielen Dank für Deine/Eure tollen Artikel, die es uns leicht machen, in anderweitige Hardware für homematic einzusteigen.
Ich habe mir heute auch einen Tinker Board S gegönnt (als Update zu meinem pi 3b+).
Leider bekomme ich das WLAN nicht zum Laufen. Nun habe ich in diesem Artikel gelesen, dass dies ein Problem sein soll.
Ist dem immer noch so?
Lg Rainer
Mit piVCCU (https://github.com/alexreinert/piVCCU) steht mittlerweile ein Projekt zur Verfügung, bei dem man die CCU auf einem Tinkerboard inkl. HmIP laufen lassen kann.
Vielleicht wollt ihr euch das ja mal anschauen und auch darüber berichten.
@deimos
Nein, Werner hält an der Raspberrymatic fest.
Ich habe ihn vor Monaten (als ich piVCCU noch nicht kannte) nach YAHM gefragt. Er wollte nur von mir wissen, warum ich nicht Raspberrymatic installieren will. Somit war das Thema für ihn gegessen. Gruß, Mathias
Hallo Alex,
wie bereits in meiner Mail beschrieben werde ich im Januar mit dir Kontakt aufnehmen und dein Projekt besprechen und Testen.
Vielen Dank dafür.
Gruss
Werner
Hi danke dir für den super Beitrag,
hab den Asus Tinker und hab mir die Version RaspberryMatic-2.29.23.20171118-tinkerboard runter geladen nur leider passiert bei mir nix.
Der Bildschirm bleibt bei mir schwarz und es hilft auch kein alt f2 ,liegt es daran das ich eine funk Tastatur hab ?
mfg Soke
Moin, danke für den Artikel. Ich stelle mir nur die Frage ist ein Upgrade zum Tinkerbord das Geld wert? Wie viel Arbeitsspeicher belegt ein normal HM User? Wieviel CPU power braucht man wirklich. OK die CCU ist veraltet. Ich denke mir aber das ein PI3 absolut unterfordert ist. Gibt es da Messwerte zu? Gruß und Danke für die vielen tollen Artikel Alex
Hallo Alex,
in einem Punkt gebe ich dir Recht, weder die Raspberry Pi noch das ASUS Tinkerboard werden mit einer Anwendung wie RaspberryMatic an ihre Leistungsgrenzen kommen. Das die CCU2 ab einer bestimmten Anzahl Aktoren und Programmen an ihre Grenzen kommt, ist aber ebenfalls unumstritten. Ich arbeite seit Anfang des Jahres bereits auf einer Raspberry Pi3 und es macht schon deutlich mehr Spass, ohne lange Wartezeiten in der WebUI zu agieren.
Meine Motivation für das Tinkerboard war zu testen ob das einwandfrei mit RaspberryMatic funktioniert. Der Wechsel von der CCU2 zum Tinkerboard macht sicher mehr Sinn wie ein Wechsel von einer Raspberry zum Tinkerboard.
Ob man sich dann für eine Raspberry oder ein Tinkerboard entscheidet kann nur jeder Anwender für sich selbst entscheiden. Dabei spielt sicherlich auch der aktuell noch höhere Preis des Tinkerboard eine Rolle. Ich möchte das mal mit unseren Autos vergleichen. Brauchen wir die Leistung wirklich im Alltag? Brauchen wir einen SUV in der Stadt? Oder machen wir manches nicht einfach nur weil es Spass macht?
Abschließend noch vielen Dank für dein Lob für die tollen Artikel. Sowas ist die beste Motivation für weitere Artikel.
Grüße und schönes Wochenende
Werner
Sie sehen gerade einen Platzhalterinhalt von Turnstile. Um auf den eigentlichen Inhalt zuzugreifen, klicken Sie auf die Schaltfläche unten. Bitte beachten Sie, dass dabei Daten an Drittanbieter weitergegeben werden.
Sie sehen gerade einen Platzhalterinhalt von Vimeo. Um auf den eigentlichen Inhalt zuzugreifen, klicken Sie auf die Schaltfläche unten. Bitte beachten Sie, dass dabei Daten an Drittanbieter weitergegeben werden.
Sie sehen gerade einen Platzhalterinhalt von YouTube. Um auf den eigentlichen Inhalt zuzugreifen, klicken Sie auf die Schaltfläche unten. Bitte beachten Sie, dass dabei Daten an Drittanbieter weitergegeben werden.
Sie sehen gerade einen Platzhalterinhalt von Facebook. Um auf den eigentlichen Inhalt zuzugreifen, klicken Sie auf die Schaltfläche unten. Bitte beachten Sie, dass dabei Daten an Drittanbieter weitergegeben werden.
Sie sehen gerade einen Platzhalterinhalt von Instagram. Um auf den eigentlichen Inhalt zuzugreifen, klicken Sie auf die Schaltfläche unten. Bitte beachten Sie, dass dabei Daten an Drittanbieter weitergegeben werden.
Sie sehen gerade einen Platzhalterinhalt von X. Um auf den eigentlichen Inhalt zuzugreifen, klicken Sie auf die Schaltfläche unten. Bitte beachten Sie, dass dabei Daten an Drittanbieter weitergegeben werden.










Hallo Werner,
zuerst einmal vielen Dank für Deine/Eure tollen Artikel, die es uns leicht machen, in anderweitige Hardware für homematic einzusteigen.
Ich habe mir heute auch einen Tinker Board S gegönnt (als Update zu meinem pi 3b+).
Leider bekomme ich das WLAN nicht zum Laufen. Nun habe ich in diesem Artikel gelesen, dass dies ein Problem sein soll.
Ist dem immer noch so?
Lg Rainer
Mit piVCCU (https://github.com/alexreinert/piVCCU) steht mittlerweile ein Projekt zur Verfügung, bei dem man die CCU auf einem Tinkerboard inkl. HmIP laufen lassen kann.
Vielleicht wollt ihr euch das ja mal anschauen und auch darüber berichten.
@deimos
Nein, Werner hält an der Raspberrymatic fest.
Ich habe ihn vor Monaten (als ich piVCCU noch nicht kannte) nach YAHM gefragt. Er wollte nur von mir wissen, warum ich nicht Raspberrymatic installieren will. Somit war das Thema für ihn gegessen. Gruß, Mathias
Hallo Alex,
wie bereits in meiner Mail beschrieben werde ich im Januar mit dir Kontakt aufnehmen und dein Projekt besprechen und Testen.
Vielen Dank dafür.
Gruss
Werner
Hi danke dir für den super Beitrag,
hab den Asus Tinker und hab mir die Version RaspberryMatic-2.29.23.20171118-tinkerboard runter geladen nur leider passiert bei mir nix.
Der Bildschirm bleibt bei mir schwarz und es hilft auch kein alt f2 ,liegt es daran das ich eine funk Tastatur hab ?
mfg Soke
Danke dir, für mein OMV(https://www.openmediavault.org/) eine gute alternative, allein wegen dem Speicher und den 1GB. mmmmhhh
Moin, danke für den Artikel. Ich stelle mir nur die Frage ist ein Upgrade zum Tinkerbord das Geld wert? Wie viel Arbeitsspeicher belegt ein normal HM User? Wieviel CPU power braucht man wirklich. OK die CCU ist veraltet. Ich denke mir aber das ein PI3 absolut unterfordert ist. Gibt es da Messwerte zu? Gruß und Danke für die vielen tollen Artikel Alex
Hallo Alex,
in einem Punkt gebe ich dir Recht, weder die Raspberry Pi noch das ASUS Tinkerboard werden mit einer Anwendung wie RaspberryMatic an ihre Leistungsgrenzen kommen. Das die CCU2 ab einer bestimmten Anzahl Aktoren und Programmen an ihre Grenzen kommt, ist aber ebenfalls unumstritten. Ich arbeite seit Anfang des Jahres bereits auf einer Raspberry Pi3 und es macht schon deutlich mehr Spass, ohne lange Wartezeiten in der WebUI zu agieren.
Meine Motivation für das Tinkerboard war zu testen ob das einwandfrei mit RaspberryMatic funktioniert. Der Wechsel von der CCU2 zum Tinkerboard macht sicher mehr Sinn wie ein Wechsel von einer Raspberry zum Tinkerboard.
Ob man sich dann für eine Raspberry oder ein Tinkerboard entscheidet kann nur jeder Anwender für sich selbst entscheiden. Dabei spielt sicherlich auch der aktuell noch höhere Preis des Tinkerboard eine Rolle. Ich möchte das mal mit unseren Autos vergleichen. Brauchen wir die Leistung wirklich im Alltag? Brauchen wir einen SUV in der Stadt? Oder machen wir manches nicht einfach nur weil es Spass macht?
Abschließend noch vielen Dank für dein Lob für die tollen Artikel. Sowas ist die beste Motivation für weitere Artikel.
Grüße und schönes Wochenende
Werner